
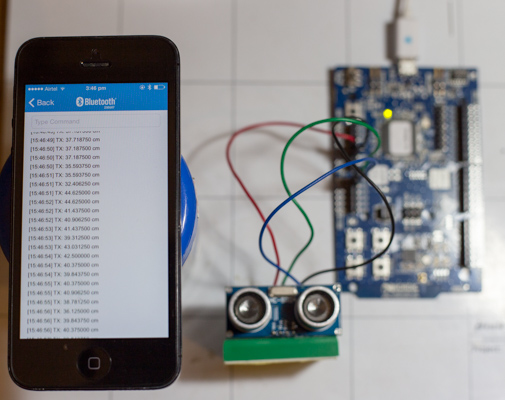
Communicating with Ultrasonic Distance Sensor HC-SR04 using nRF51-DK (nRF51822/nRF51422), and transmitting measured distance over BLE UART.
http://electronut.in/nrf51-hcsr04/


Communicating with Ultrasonic Distance Sensor HC-SR04 using nRF51-DK (nRF51822/nRF51422), and transmitting measured distance over BLE UART.
http://electronut.in/nrf51-hcsr04/

