Hello and Thank you In Advance for Your Assistance. I have been working several days just to get a UART running for interface to a peripheral.
I am trying to connect a UART peripheral to my nRF9160DK board on the PO lines. I have followed Case ID 226331.to get the UART0 and UART1 connected.
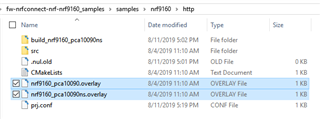
My overall project requires an HTTP connection to GET data from a server over the modem and pass it to 2 UART based peripherals. I downloaded the http sample from GitHub and have succeeded in integrating it to download 2 sets of data from a server as text strings. I need to pass them out the UARTs to the peripherals. Following the instructions on Case ID 226331, I have modified the prj.conf file and created the nrf9160_pca10090.overlay file.
If I just enable the UART0, It appears that I am sending out data on the TX but I do not get any signal changes on the PO.28 pin (it remains a low level).
Here is the prj.conf file:
CONFIG_BSD_LIBRARY=y CONFIG_GPIO=n CONFIG_SERIAL=y CONFIG_STDOUT_CONSOLE=y CONFIG_UART_INTERRUPT_DRIVEN=y CONFIG_BOARD_PCA10090_UART0_ARDUINO=y CONFIG_BOARD_PCA10090_UART1_ARDUINO=y CONFIG_UART_0_NRF_UARTE=y CONFIG_UART_1_NRF_UARTE=y CONFIG_TEST_RANDOM_GENERATOR=y CONFIG_NETWORKING=y CONFIG_NET_BUF_USER_DATA_SIZE=1 CONFIG_NET_SOCKETS_OFFLOAD=y CONFIG_NET_SOCKETS=y CONFIG_NET_SOCKETS_POSIX_NAMES=y CONFIG_NET_RAW_MODE=y CONFIG_TRUSTED_EXECUTION_NONSECURE=y CONFIG_LOG=n CONFIG_LOG_DEFAULT_LEVEL=4 CONFIG_HEAP_MEM_POOL_SIZE=1024 # LTE link control CONFIG_LTE_LINK_CONTROL=y CONFIG_MAIN_STACK_SIZE=4096
Here is the nrf9160_pca10090.overlay file:
/*Uart 0*/
&uart0 {
current-speed = <115200>;
status = "ok";
tx-pin = <10>;
rx-pin = <11>;
rts-pin = <12>;
cts-pin = <13>;
};
/*end of code added by Johnny Lienau on March 4*/
/* Uart 1 */
&uart1 {
current-speed = <115200>;
status = "ok";
tx-pin = <25>;
rx-pin = <26>;
rts-pin = <27>;
cts-pin = <28>;
};
Here is the code to init the UARTS:
//////////UART setup
struct device *uart0 = device_get_binding("UART_0");
uart_irq_callback_set(uart0, uart_cb0);
uart_irq_rx_enable(uart0);
printk("uart0 ready\n");
struct device *uart1 = device_get_binding("UART_1");
uart_irq_callback_set(uart1, uart_cb1);
uart_irq_rx_enable(uart1);
printk("uart1 ready\n");
Here are the call backs and transmit function:
static u8_t uart_buf[1024];
static char *command0 = "This Is A Test of UART0\r\n";
static char *command1 = "This Is A Test of UART1\r\n";
u8_t i = 0;
void uart_cb0(struct device *x)
{
uart_irq_update(x); //start processing interrupts in the ISR
int data_length = 0;
printk("Callback!\r\n");
if (uart_irq_rx_ready(x)) { //check if UART RX buffer has a received char
data_length = uart_fifo_read(x, uart_buf, sizeof(uart_buf)); //read ata from FIFO
uart_buf[data_length] = 0;
}
printk("%s", uart_buf);
}
void uart_cb1(struct device *x)
{
uart_irq_update(x);
int data_length = 0;
printk("Callback!\r\n");
if (uart_irq_rx_ready(x)) {
data_length = uart_fifo_read(x, uart_buf, sizeof(uart_buf));
uart_buf[data_length] = 0;
}
printk("%s", uart_buf);
}
void uart_send_str(struct device *uart, char *str){
printk("Transmit!\r\n");
u32_t len = strlen(str);
while (len--) {
uart_poll_out(uart, *str++);
}
}
Here is the code to send data out of the UARTs (only UART0 is being tested first)
uart_send_str(uart0, command0);
//uart_send_str(uart1, command1);
while (1) {
uart_send_str(uart1, command0);
//uart_send_str(uart0, command1);
k_cpu_idle();
}
MY PROBLEMS:
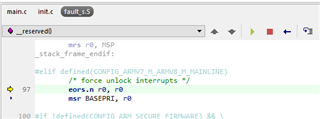
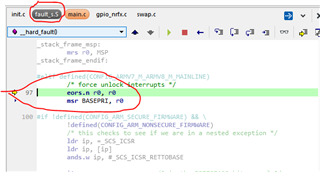
1. If I try to init uart1 it compiles fine but I get the following error during run debug time:
2. If I comment out the UART1 init, the program runs and it appears that UART0 is transmitting the test data but there is no output on PO.28 (it is not even high during idle);
My objective is to be able to set UART1 to 9600 baud for my peripheral and leave UART0 at 115200.
Below is my entire main.c (except I have changed the server to a false name so I do not get any hits on it). The GET functions work fine and my data is collected over the modem in about 6 seconds from a cold start. For testing of the UARTs, I have also commented out the HTTP calls in the main loop to allow for initial testing of the UARTs.
I would greatly appreciate any help you can provide. I have gone through several posts but they all are specific to other issues and do not provide enough basic information on how to simply set up a UART on the nRF9160 board.
I will also need several GPIO pins, ADCs, and PWMs going out through the PO connectors from the nRF9160. I would also appreciate any guidance and basic overview of this process.
.
/*
* Copyright (c) 2018 Nordic Semiconductor ASA
*
* SPDX-License-Identifier: LicenseRef-BSD-5-Clause-Nordic
*/
#include <zephyr.h>
#include <net/socket.h>
#include <stdio.h>
#include <uart.h>
#include <string.h>
//#define HTTP_HOST "google.com"
//#define HTTP_PORT 80
//#define RECV_BUF_SIZE 8192
/********************
static u8_t uart_buf[1024];
void uart_cb(struct device *x)
{
uart_irq_update(x);
int data_length = 0;
if (uart_irq_rx_ready(x)) {
data_length = uart_fifo_read(x, uart_buf, sizeof(uart_buf));
uart_buf[data_length] = 0;
}
printk("%s", uart_buf);
}
******************/
static u8_t uart_buf[1024];
static char *command0 = "This Is A Test of UART0\r\n";
static char *command1 = "This Is A Test of UART1\r\n";
u8_t i = 0;
void uart_cb0(struct device *x)
{
uart_irq_update(x); //start processing interrupts in the ISR
int data_length = 0;
printk("Callback!\r\n");
if (uart_irq_rx_ready(x)) { //check if UART RX buffer has a received char
data_length = uart_fifo_read(x, uart_buf, sizeof(uart_buf)); //read ata from FIFO
uart_buf[data_length] = 0;
}
printk("%s", uart_buf);
}
void uart_cb1(struct device *x)
{
uart_irq_update(x);
int data_length = 0;
printk("Callback!\r\n");
if (uart_irq_rx_ready(x)) {
data_length = uart_fifo_read(x, uart_buf, sizeof(uart_buf));
uart_buf[data_length] = 0;
}
printk("%s", uart_buf);
}
void uart_send_str(struct device *uart, char *str){
printk("Transmit!\r\n");
u32_t len = strlen(str);
while (len--) {
uart_poll_out(uart, *str++);
}
}
#define HTTP_HOST "dev1.otp.myserver.info"
#define HTTP_PORT 80
#define RECV_BUF_SIZE 8192
char recv_buf[RECV_BUF_SIZE + 1];
char header_store[RECV_BUF_SIZE + 1];
int blocking_recv(int fd, u8_t *buf, u32_t size, u32_t flags)
{
int err;
do {
err = recv(fd, buf, size, flags);
} while (err < 0 && errno == EAGAIN);
return err;
}
int blocking_send(int fd, u8_t *buf, u32_t size, u32_t flags)
{
int err;
do {
err = send(fd, buf, size, flags);
} while (err < 0 && errno == EAGAIN);
return err;
}
int blocking_connect(int fd, struct sockaddr *local_addr, socklen_t len)
{
int err;
do {
err = connect(fd, local_addr, len);
} while (err < 0 && errno == EAGAIN);
return err;
}
void app_http_get_header(void)
{
struct sockaddr_in local_addr;
struct addrinfo *res;
local_addr.sin_family = AF_INET;
local_addr.sin_port = htons(0);
local_addr.sin_addr.s_addr = 0;
printk("HTTP example\n\r");
int err = getaddrinfo(HTTP_HOST, NULL, NULL, &res);
printk("getaddrinfo err: %d\n\r", err);
((struct sockaddr_in *)res->ai_addr)->sin_port = htons(HTTP_PORT);
//http://dev1.otp.myserver.info/rt/dev_test_falcon_20190722/sample_body?k=falcon_key&format=text
char send_buf[] =
"GET /rt/dev_test_falcon_20190722/sample_header?k=falcon_key&format=text HTTP/1.1\r\nHost:dev1.otp.myserver.info:80\r\nConnection: close\r\n\r\n";
//char send_buf[] =
// "GET /rt/dev_test_falcon_20190722/sample_body?k=falcon_key&format=text HTTP/1.1\r\nHost:dev1.otp.myserver.info:80\r\nConnection: close\r\n\r\n";
//char send_buf[] =
// "GET / HTTP/1.1\r\nHost: www.google.com:80\r\nConnection: close\r\n\r\n";
int send_data_len = strlen(send_buf);
int client_fd = socket(AF_INET, SOCK_STREAM, 0);
printk("client_fd: %d\n\r", client_fd);
err = bind(client_fd, (struct sockaddr *)&local_addr,
sizeof(local_addr));
printk("bind err: %d\n\r", err);
err = blocking_connect(client_fd, (struct sockaddr *)res->ai_addr,
sizeof(struct sockaddr_in));
printk("connect err: %d\n\r", err);
printk("COMMAND USED: %s\r\n",send_buf);
int num_bytes = send(client_fd, send_buf, send_data_len, 0);
printk("send err: %d\n\r", num_bytes);
//int tot_num_bytes = 0;
//bool buf_rcvd = false;
//do {
/* TODO: make a proper timeout *
* Current solution will just hang
* until remote side closes connection */
num_bytes =
blocking_recv(client_fd, recv_buf, RECV_BUF_SIZE, 0);
//tot_num_bytes += num_bytes;
printk("\r\nnum_bytes = %i\r\n",num_bytes);
//if (num_bytes <= 0) {
// break;
//}
printk("%s\r\n", recv_buf);
//header_store = recv_buf;
printk("Got Here!\r\n");
printk("Finished. Closing socket\r\n");
freeaddrinfo(res);
err = close(client_fd);
}
void app_http_get_body(void)
{
struct sockaddr_in local_addr;
struct addrinfo *res;
local_addr.sin_family = AF_INET;
local_addr.sin_port = htons(0);
local_addr.sin_addr.s_addr = 0;
printk("HTTP example\n\r");
int err = getaddrinfo(HTTP_HOST, NULL, NULL, &res);
printk("getaddrinfo err: %d\n\r", err);
((struct sockaddr_in *)res->ai_addr)->sin_port = htons(HTTP_PORT);
//http://dev1.otp.myserver.info/rt/dev_test_falcon_20190722/sample_body?k=falcon_key&format=text
//char send_buf[] =
// "GET /rt/dev_test_falcon_20190722/sample_header?k=falcon_key&format=text HTTP/1.1\r\nHost:dev1.otp.mmyserverytransit.info:80\r\nConnection: close\r\n\r\n";
char send_buf[] =
"GET /rt/dev_test_falcon_20190722/sample_body?k=falcon_key&format=text HTTP/1.1\r\nHost:dev1.otp.myserver.info:80\r\nConnection: close\r\n\r\n";
//char send_buf[] =
// "GET / HTTP/1.1\r\nHost: www.google.com:80\r\nConnection: close\r\n\r\n";
int send_data_len = strlen(send_buf);
int client_fd = socket(AF_INET, SOCK_STREAM, 0);
printk("client_fd: %d\n\r", client_fd);
err = bind(client_fd, (struct sockaddr *)&local_addr,
sizeof(local_addr));
printk("bind err: %d\n\r", err);
err = blocking_connect(client_fd, (struct sockaddr *)res->ai_addr,
sizeof(struct sockaddr_in));
printk("connect err: %d\n\r", err);
printk("COMMAND USED: %s\r\n",send_buf);
int num_bytes = send(client_fd, send_buf, send_data_len, 0);
printk("send err: %d\n\r", num_bytes);
//int tot_num_bytes = 0;
//bool buf_rcvd = false;
//do {
num_bytes =
blocking_recv(client_fd, recv_buf, RECV_BUF_SIZE, 0);
//tot_num_bytes += num_bytes;
printk("\r\nnum_bytes = %i\r\n",num_bytes);
//if (num_bytes <= 0) {
// break;
//}
printk("%s\r\n", recv_buf);
printk("Got Here!\r\n");
printk("Finished. Closing socket\r\n");
freeaddrinfo(res);
err = close(client_fd);
}
int main(void)
{
//app_http_get_header();
//app_http_get_body();
//////////UART setup
struct device *uart0 = device_get_binding("UART_0");
uart_irq_callback_set(uart0, uart_cb0);
uart_irq_rx_enable(uart0);
printk("uart0 ready\n");
struct device *uart1 = device_get_binding("UART_1");
uart_irq_callback_set(uart1, uart_cb1);
uart_irq_rx_enable(uart1);
printk("uart1 ready\n");
//struct device *uart = device_get_binding("UART_0");
//uart_irq_callback_set(uart, uart_cb);
//uart_irq_rx_enable(uart);
//printk("UART loopback start!\n");
////////////
uart_send_str(uart0, command0);
//uart_send_str(uart1, command1);
while (1) {
uart_send_str(uart1, command0);
//uart_send_str(uart0, command1);
k_cpu_idle();
}
}