
Hello all,
I am trying to make use of some Adafruit libraries for some sensors in my nrF52pca10040, the libraries are these twoAdafruit_BME280.cpp, Adafruit_BME280.h and Adafruit_TSL2591.h,Adafruit_TSL2591.cpp
They both make use of either SPI or I2C interfaces, I am interested on I2C, so I was trying to port both to the nrF52, I have started with the BME280 one. Using SEGGER I am compiling them but I am getting an error when reaching the method Wire.begin(); on Adafruit_BME280::begin(uint8_t a), which is expected since this function is from Arduino.
I have looked into the example twi_sensor and I see that there the twi_init is configured as
const nrf_drv_twi_config_t twi_lm75b_config = {
.scl = ARDUINO_SCL_PIN,
.sda = ARDUINO_SDA_PIN,
.frequency = NRF_TWI_FREQ_100K,
.interrupt_priority = APP_IRQ_PRIORITY_HIGH,
.clear_bus_init = false
};
Can I use the same configuration for my case? What should I change to be able to make use of that library?
On the other hand, those libs work a lot with the definitions HIGH,LOW,INPUT or OUTPUT, where can I find those definitons for the nrf52 board? As well as functions as configuring the PIN(pinmode(pin,OUPUT)) and writing onto it (digitalWrite(pin,HIGH)) ?
Thank you very much in advance,
Kind regards
Edit: following the advice of Jorgen, I have created my own version of the begin, read and write, however, even though there is no compilation errors, debuging the lib it gets stack when reaching the condition if (read8(BME280_REGISTER_CHIPID) != 0x60) in the begin() method.
bool Adafruit_BME280::begin(uint8_t a) {
_i2caddr = a;
if (_cs == -1) {
// i2c
//Wire.begin();
ret_code_t err_code;
const nrf_drv_twi_config_t twi_BME280_config = {
.scl = ARDUINO_SCL_PIN,
.sda = ARDUINO_SDA_PIN,
.frequency = NRF_TWI_FREQ_100K,
.interrupt_priority = APP_IRQ_PRIORITY_HIGH,
.clear_bus_init = false
};
err_code = nrf_drv_twi_init(&m_twi, &twi_BME280_config, twi_handler, NULL);
APP_ERROR_CHECK(err_code);
nrf_drv_twi_enable(&m_twi);
} else {
// digitalWrite(_cs, HIGH);
// pinMode(_cs, OUTPUT);
//
// if (_sck == -1) {
// // hardware SPI
// SPI.begin();
// } else {
// // software SPI
// pinMode(_sck, OUTPUT);
// pinMode(_mosi, OUTPUT);
// pinMode(_miso, INPUT);
// }
}
if (read8(BME280_REGISTER_CHIPID) != 0x60)
return false;
readCoefficients();
//Set before CONTROL_meas (DS 5.4.3)
write8(BME280_REGISTER_CONTROLHUMID, 0x05); //16x oversampling
write8(BME280_REGISTER_CONTROL, 0xB7); // 16x ovesampling, normal mode
return true;
}
void Adafruit_BME280::write8(byte reg, byte value)
{
if (_cs == -1) {
ret_code_t err_code;
err_code = nrf_drv_twi_tx(&m_twi, _i2caddr, (const byte*)reg, sizeof(reg), false);
APP_ERROR_CHECK(err_code);
err_code = nrf_drv_twi_tx(&m_twi, _i2caddr, (byte*)value, sizeof(value), false);
APP_ERROR_CHECK(err_code);
// Wire.beginTransmission((uint8_t)_i2caddr);
// Wire.write((uint8_t)reg);
// Wire.write((uint8_t)value);
// Wire.endTransmission();
}}
uint8_t Adafruit_BME280::read8(byte reg)
{
uint8_t value = 0;
uint8_t valueAux = 0;
if (_cs == -1) {
ret_code_t err_code = nrf_drv_twi_rx(&m_twi, _i2caddr, &valueAux, sizeof(byte));
APP_ERROR_CHECK(err_code);
if (m_rxfer_done) {
value = valueAux;//getting the value of the pointer
m_rxfer_done = false;
}
// Wire.beginTransmission((uint8_t)_i2caddr);
// Wire.write((uint8_t)reg);
// Wire.endTransmission();
// Wire.requestFrom((uint8_t)_i2caddr, (byte)1);
// value = Wire.read();
}
return value;
}
void Adafruit_BME280::twi_handler(nrf_drv_twi_evt_t const *p_event, void *p_context) {
switch (p_event->type) {
case NRF_DRV_TWI_EVT_DONE:
if (p_event->xfer_desc.type == NRF_DRV_TWI_XFER_RX) {
m_rxfer_done = true;
} else if (p_event->xfer_desc.type == NRF_DRV_TWI_XFER_TX) {
m_txfer_done = true;
}
break;
default:
break;
}
}
EDIT2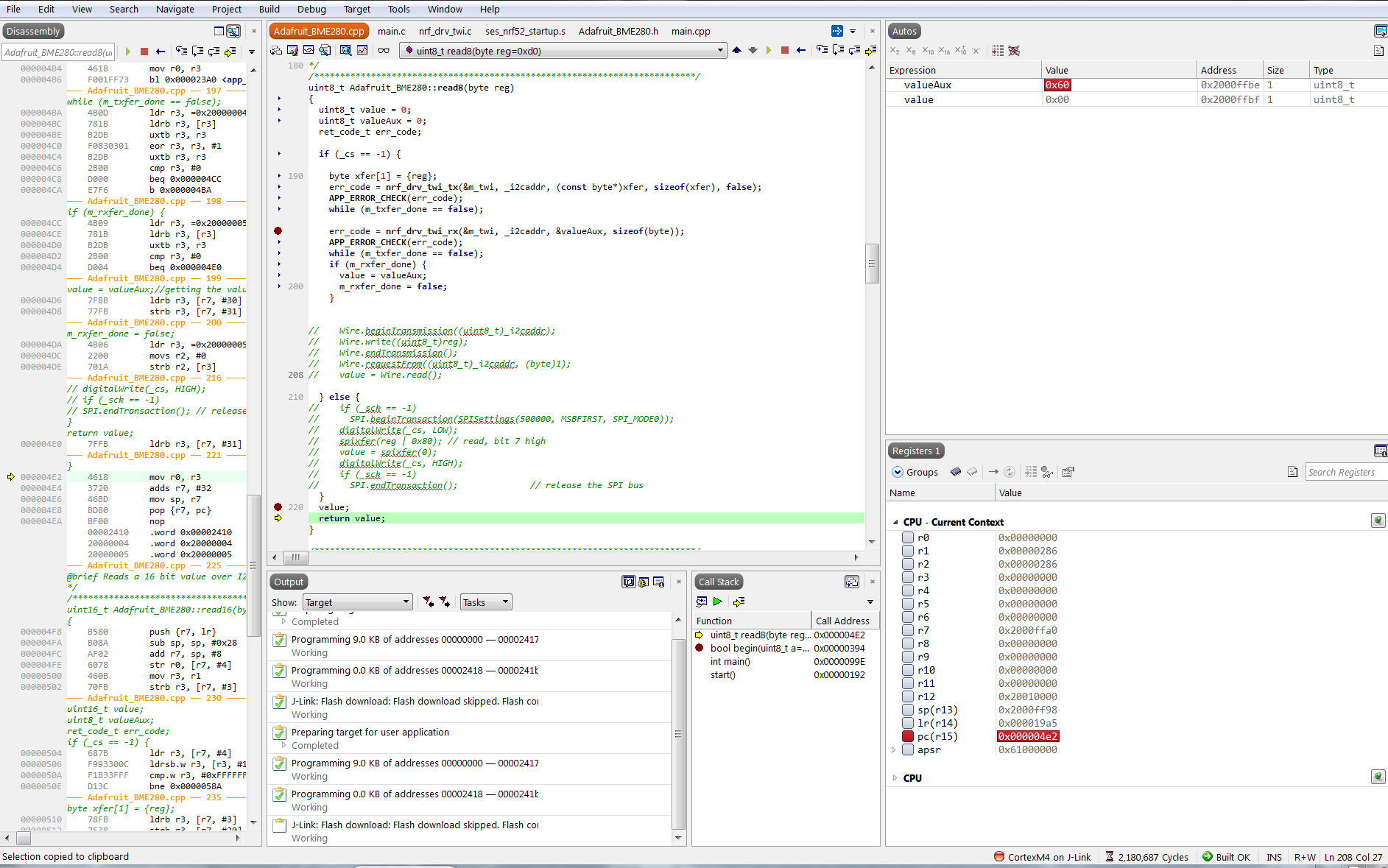 Debug
Debug

