

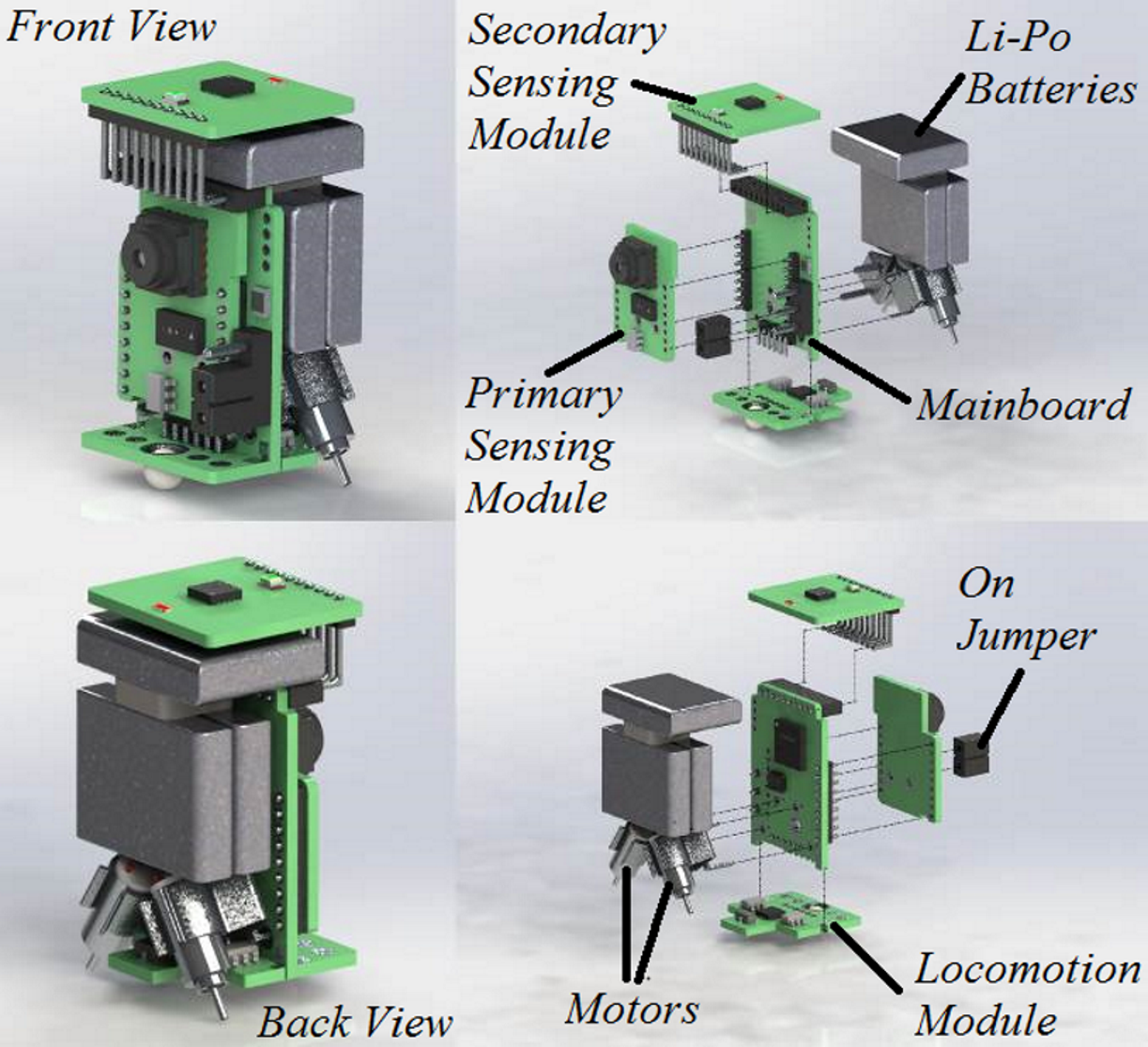
mROBerTO (milli-ROBot-TOronto) is a small modular millirobot designed and implemented for swarm robotics research. It was first featured in the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). It consists of an nRF51422 as its main system-on-chip and has various sensors such as a camera, proximity/ambient light sensors, IMUs, and IR. It has two small motors in the back which act like two wheels and allows the robot to move with a differential drive configuration.

We had specific design objectives for mROBerTO in order to meet our needs: maximum (i) modularity for easy changes and upgrades of individual modules, (ii) use of off-the-shelf components for ease of assembly, production, and maintenance, and (iii) processing and sensing capabilities, as well as minimum footprint to allow large number of units operating in small arenas.
How small are they?
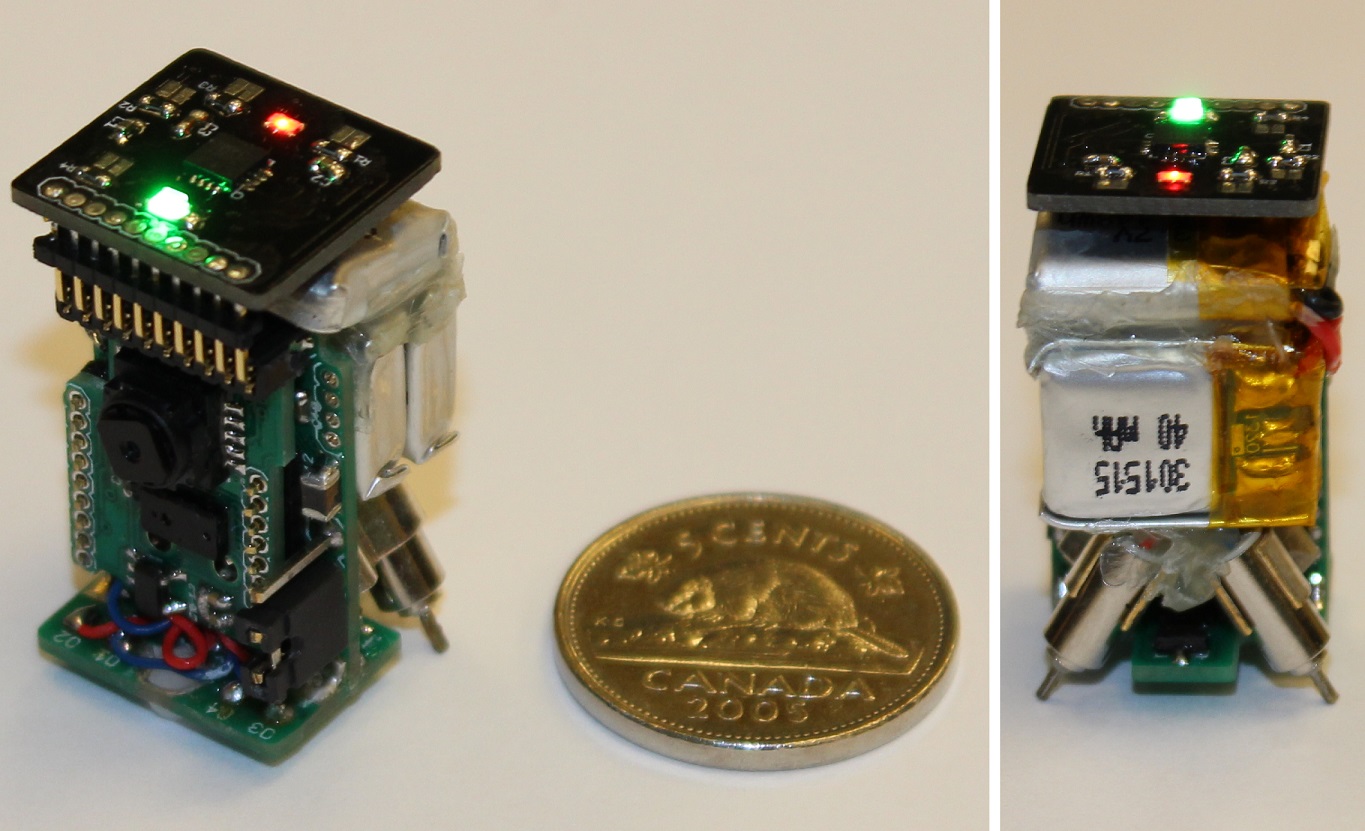
The footprint of the robot is 16 mm × 16 mm and the height of the robot is 32 mm. Below is a picture of the robot beside a Canadian nickel (diameter of 21.2 mm) for a size comparison. The reason we designed it to be so small is because the swarm in swarm robotics often consists of tens and even hundreds of robots operating at once. With limited areas in lab settings, we need the robots to be as small as possible so that we can test our swarm algorithms with as many robots required for the experiments.
Modular design
One of the key features of mROBerTO is its modular design, allowing exchanges of processing and sensing hardware with ease. This was done so that swarm robotics researchers can use mROBerTO however they see fit for running their experiments. Some swarm experiments may require specialized sensors on the robots so rapid exchanging is a great feature for the researchers. Also, because of its modular design, these robots can be used for any other miniature robot projects.
What can they do?
Using its IR phototransistors and emitters, individual robot can receive and send out modulated IR signals that can be used to detect other nearby robots’ proximities with their unique robot IDs. Also, the ANT Wireless capability allows the robots to wirelessly communicate using mesh network. With the use of modulated IR signals and ANT Wireless, we can make these robots do some interesting stuff autonomously in a fully decentralized manner. Global collective behaviors can emerge such as aggregation, chain formation, and collective exploration as shown in this overview video of mROBerTOs.

