

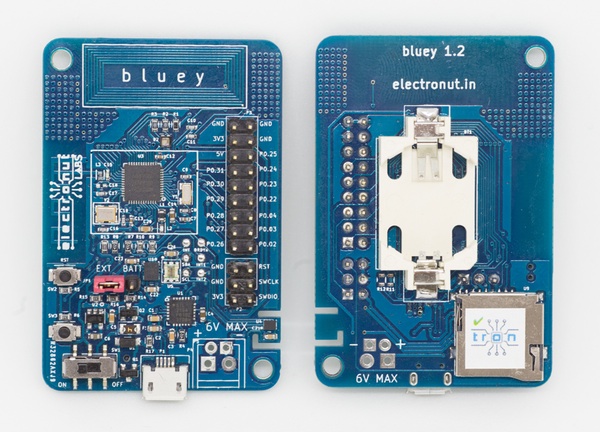
When we built our Bluey nRF52 BLE dev board, we were looking for an inexpensive option for our users to upload code to bluey and debug it using ARM GDB. We then came across the blackmagic probe (BMP) project - an Open Source debugging tool for embedded microprocessors. It greatly simplifies the debugging and code uploading process using just ARM GDB - no need to run a GDB server or use an additional complex tool like openocd. Although the BMP hardware is excellent, it's bit beyond the budget of our target audience as an add-on programmer. But luckily, their firmware supports STM32F013, which can be leveraged to build a cheap programmer. Ultimately, we decided to make use of their liberal open source license and build something that fits our budget, albeit with less capabilities. Both these options are outlined below.
Method I: Black Magic Probe on STM32F103 "Blue Pill"
There's a very cheap (USD 2-5) STM32F103 board commonly known as the "blue pill". In this section, we'll upload the Black Magic Probe firmware to it, using another cheap (USD 2) piece of hardware - an ST-Link V2 clone.
These instructions are for Windows OS.
Preparing the hardware
Here's what you need for this task:
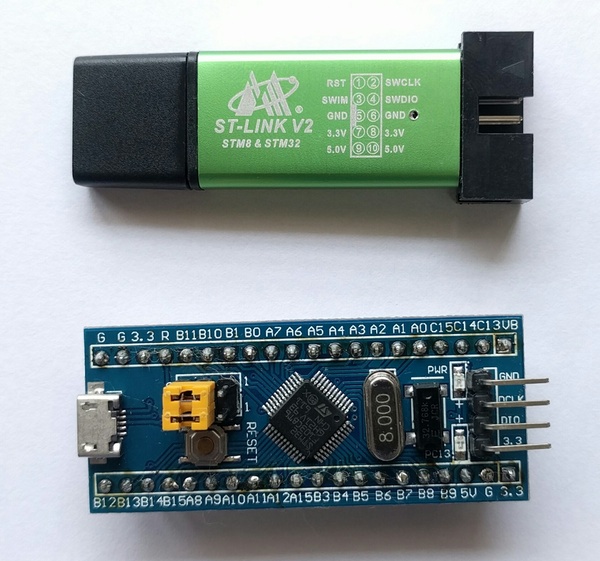
- One STM32F103 "Blue Pill"
- One cheap ST-Link V2 clone
- STM32 ST-Link Utility from ST Microelectronics.
- GNU ARM Embedded toolchain and the Nordic nRF5 SDK. Read our SDk setup guide for instructions.
- Black Magic Probe firmware. Click here to read about how to build it. (You need blackmagic.bin and blackmagic_dfu.bin built with make PROBE_HOST=stlink.)
(Why not just use two ST-Link V2s? Well, because some of those use the STMF32F101 chip, and we need STM32F103 to ensure that Black Magic Probe firmware works properly.)
Here's what the hardware looks like:
Now, hook them up as follows.
| ST-Link V2 | Blue Pill |
|----------|-------|
| 3.3 | 3.3|
| GND | GND|
| SWDIO | DIO|
| SWCLK | DCLK|
Here's what the connections look like:
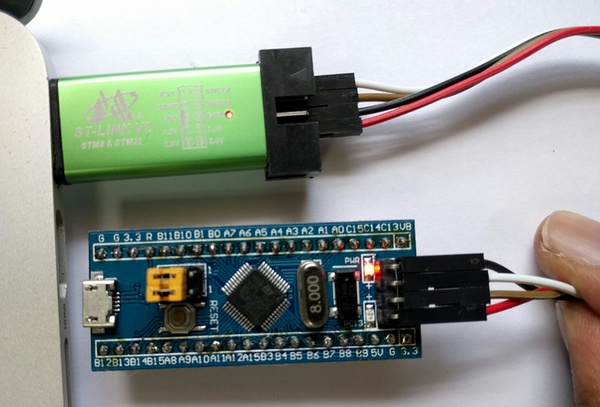
Ensure that the yellow jumpers on the "blue pill" are set such that BOOT0 and BOOT1 and connected to GND.
Now open ST-Link utility and erase the target chip (blue pill). Then program blackmagic_dfu.bin to the blue pill at the address 0x8000000.
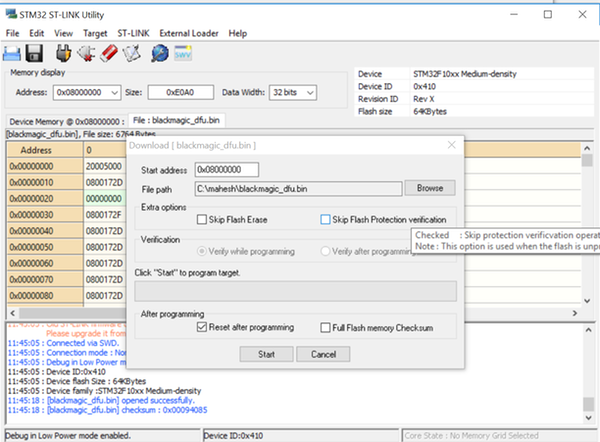
Next, program blackmagic.bin at the address 0x8002000 in a similar fashion.
If all went well, you'll see the following in the Device Manager.
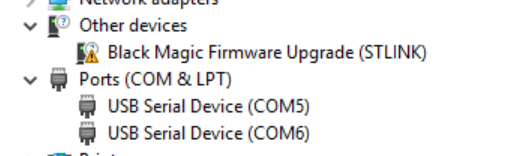
Now your Black Magic Probe clone is ready to some programming.
Using the hardware
Here, we assume that you have files blinky.hex and blinky.out in the working directory where you start GDB. (You can generate these files yourself using the peripheral/blinky/pca10040/blank example in the Nordic SDK.)
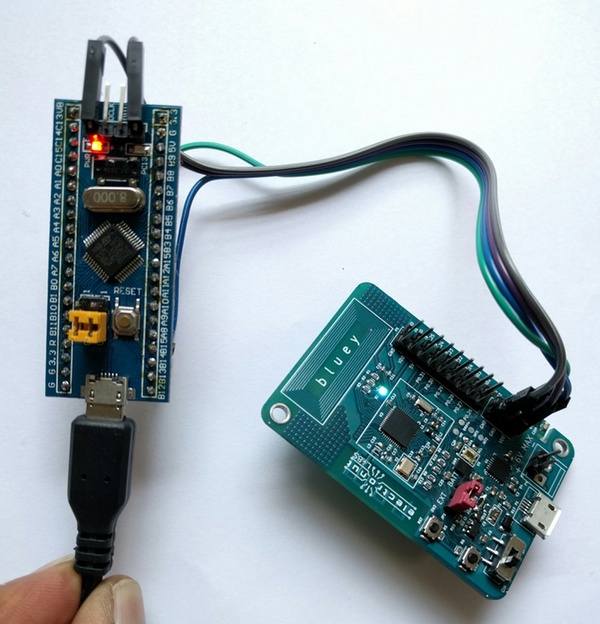
Connect the debugger to bluey as follows:
| Debugger | bluey |
|----------|-------|
| 3.3 | VDD|
| GND | GND|
| PA5 | SWCLK|
| PB14 | SWDIO|
Here's what the hookup looks like:
Now, open a command shell and run arm-none-eabi-gdb:
C:\Users\mahesh>arm-none-eabi-gdb
GNU gdb (GNU Tools for ARM Embedded Processors 6-2017-q1-update) 7.12.1.20170215-git
Copyright (C) 2017 Free Software Foundation, Inc.
License GPLv3+: GNU GPL version 3 or later <http://gnu.org/licenses/gpl.html>
This is free software: you are free to change and redistribute it.
There is NO WARRANTY, to the extent permitted by law. Type "show copying"
and "show warranty" for details.
This GDB was configured as "--host=i686-w64-mingw32 --target=arm-none-eabi".
Type "show configuration" for configuration details.
For bug reporting instructions, please see:
<http://www.gnu.org/software/gdb/bugs/>.
Find the GDB manual and other documentation resources online at:
<http://www.gnu.org/software/gdb/documentation/>.
For help, type "help".
Type "apropos word" to search for commands related to "word".
(gdb)
Now you need to connect to the target. The Black Magic Probe hardware will create two COM ports, and you need to connect to the first one for debugging. (You can see the ports in the Device Manager.)
(gdb) target extended-remote COM5
Remote debugging using COM5
Now, we scan for targets. We're using SWD here.
(gdb) monitor swdp_scan
Target voltage: unknown
Available Targets:
No. Att Driver
1 Nordic nRF52
You can see above that it found our nRF52 target - the chip in Bluey. Now let's connect to it.
(gdb) attach 1
Attaching to Remote target
warning: No executable has been specified and target does not support
determining executable automatically. Try using the "file" command.
0x0002099e in ?? ()
(gdb)
Now let's upload some code to the flash memory.
(gdb) file blinky.hex
Reading symbols from blinky.hex...(no debugging symbols found)...done.
Now let's run the program.
(gdb) run
Starting program: C:\mahesh\nRF5_SDK_12.2.0_f012efa\examples\peripheral\blinky\pca10040\blank\armgcc\_build\blinky.hex
At this point you'll be able to see the LED blinking on bluey in various colors.
Now we're ready to do some debugging. We'll use the .out file this time, since that has the necessary code symbols required for debugging.
(gdb) file blinky.out
A program is being debugged already.
Are you sure you want to change the file? (y or n) y
Reading symbols from blinky.out...done.
(gdb) run
The program being debugged has been started already.
Start it from the beginning? (y or n) y
Starting program: C:\mahesh\nRF5_SDK_12.2.0_f012efa\examples\peripheral\blinky\pca10040\blank\armgcc\_build\blinky.out
Now press Ctrl-C.
Program received signal SIGINT, Interrupt.
0x00001990 in nrf_delay_us (number_of_us=500000) at ../../../../../../components/drivers_nrf/delay/nrf_delay.h:128
128 __ASM volatile (
(gdb) list
123 __STATIC_INLINE void nrf_delay_us(uint32_t number_of_us)
124 {
125 const uint32_t clock16MHz = CLOCK_FREQ_16MHz;
126 if (number_of_us)
127 {
128 __ASM volatile (
129 #if ( defined(__GNUC__) && (__CORTEX_M == (0x00U) ) )
130 ".syntax unified\n"
131 #endif
132 "1:\n"
(gdb)
As you can see, it's showing you the code being executed. Now let's put a breakpoint in main.c:
(gdb) break main.c:43
Breakpoint 4 at 0x1a04: file ../../../main.c, line 43.
(gdb) run
The program being debugged has been started already.
Start it from the beginning? (y or n) y
Starting program: C:\mahesh\nRF5_SDK_12.2.0_f012efa\examples\peripheral\blinky\pca10040\blank\armgcc\_build\blinky.out
Breakpoint 4, main () at ../../../main.c:43
43 nrf_delay_ms(500);
(gdb) list
38 while (true)
39 {
40 for (int i = 0; i < LEDS_NUMBER; i++)
41 {
42 bsp_board_led_invert(i);
43 nrf_delay_ms(500);
44 }
45 }
46 }
47
(gdb) p i
$2 = 0
(gdb) continue
Continuing.
Breakpoint 4, main () at ../../../main.c:43
43 nrf_delay_ms(500);
(gdb) p i
$3 = 1
(gdb)
As you can see above, as we loop through, we can see i changing. Cool huh?
If you want to learn how to use GDB I highly recommend Art of debugging by Norman Matloff and Peter Jay Salzman.
Loading code with Softdevice
In the above example, we used the blinky code which did not have a Softdevice. Since most of our use of this chip will use BLE and hence a Nordic Softdevice, let's take the SDK example ble_app_hrs and see how to load it.
First, build ble_app_hrs to generate the program hex file. Then use the Nordic mergehex tool to combine the softdevice and program as given below. The softdevice cam be found in components/softdevice folder of the SDK.
c:\mahesh\tmp>mergehex -m s132_nrf52_3.0.0_softdevice.hex nrf52832_xxaa.hex -o out.hex
Parsing input hex files.
Merging files.
Storing merged file.
c:\mahesh\tmp>ls -l
total 467
-rw-r--r-- 1 info Administ 130859 May 8 08:33 nrf52832_xxaa.hex
-rw-r--r-- 1 info Administ 476926 May 8 08:35 out.hex
-rw-r--r-- 1 info Administ 346118 Jul 25 2016 s132_nrf52_3.0.0_softdevice.hex
Now load it using our Black Magic Probe clone as shown before.
(gdb) load out.hex
Loading section .sec1, size 0x964 lma 0x0
Loading section .sec2, size 0xf000 lma 0x1000
Loading section .sec3, size 0xe740 lma 0x10000
Loading section .sec4, size 0x1000 lma 0x1f000
Loading section .sec5, size 0xa5a4 lma 0x20000
Start address 0x0, load size 169544
Transfer rate: 17 KB/sec, 968 bytes/write.
(gdb) run
And now you'll see the HRS app running happily on bluey!
Method II: Use our Bumpy SWD programmer
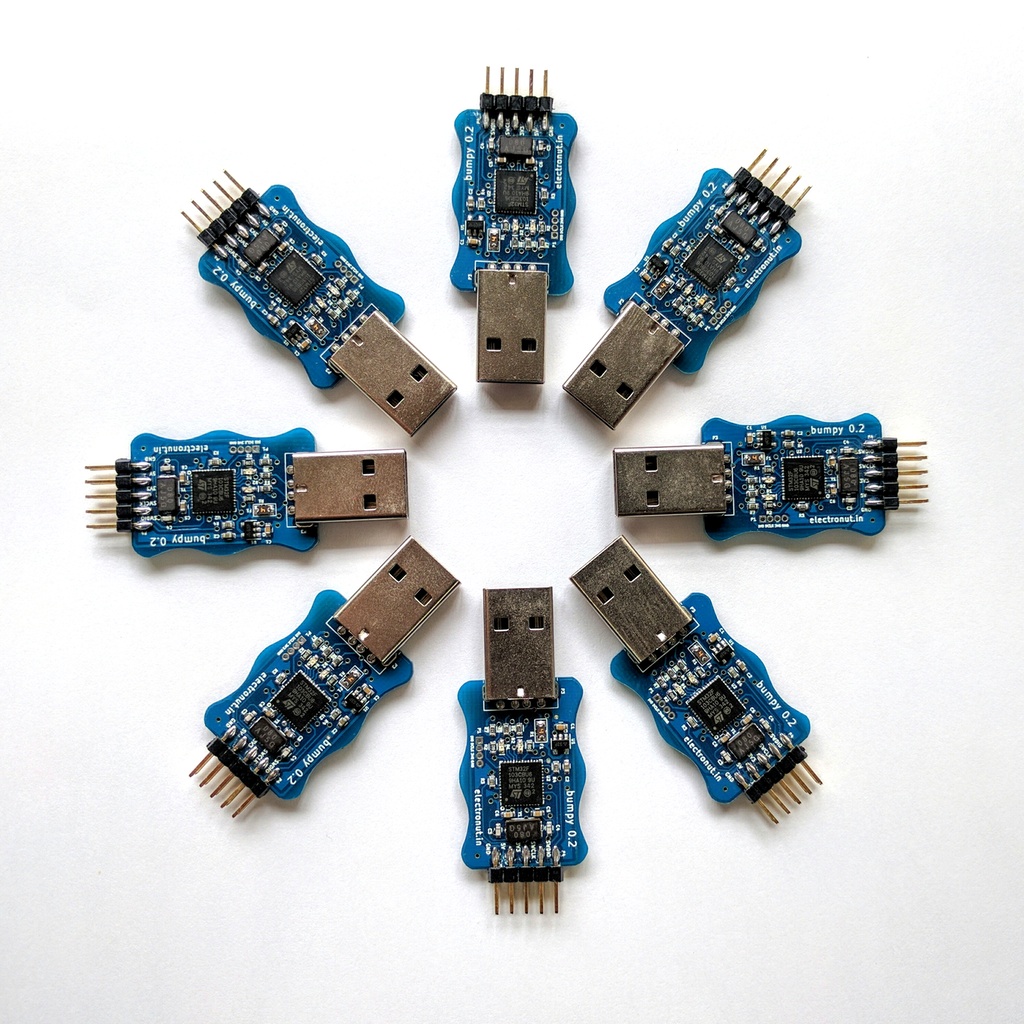
The "blue pill" method is simple, but if you're looking for something easy to get going, we've done the work of creating a blackmagic compatible programmer for you. It's available for purchase at our Tindie store.



