
I am learning about Zephyr and currently I am experimenting with the accelerometer on the Nordic Thingy91 device. For programming, I use VSCode and NCS v2.5.0
My full source code:
#include <stdio.h>
#include <stdlib.h>
#include <zephyr/kernel.h>
#include <zephyr/drivers/spi.h>
#include <zephyr/device.h>
#include <zephyr/drivers/sensor.h>
#define LOG_LEVEL 4
#include <zephyr/logging/log.h>
LOG_MODULE_REGISTER(main);
struct sensor_value data[3];
/* Convert to s/m2 depending on the maximum measured range used for adxl362. */
#if IS_ENABLED(CONFIG_ADXL362_ACCEL_RANGE_2G)
#define ADXL362_RANGE_MAX_M_S2 19.6133
#elif IS_ENABLED(CONFIG_ADXL362_ACCEL_RANGE_4G)
#define ADXL362_RANGE_MAX_M_S2 39.2266
#elif IS_ENABLED(CONFIG_ADXL362_ACCEL_RANGE_8G)
#define ADXL362_RANGE_MAX_M_S2 78.4532
#endif
/* This is derived from the sensitivity values in the datasheet. */
#define ADXL362_THRESHOLD_RESOLUTION_DECIMAL_MAX 2000
#if IS_ENABLED(CONFIG_ADXL362_ACCEL_ODR_12_5)
#define ADXL362_TIMEOUT_MAX_S 5242.88
#elif IS_ENABLED(CONFIG_ADXL362_ACCEL_ODR_25)
#define ADXL362_TIMEOUT_MAX_S 2621.44
#elif IS_ENABLED(CONFIG_ADXL362_ACCEL_ODR_50)
#define ADXL362_TIMEOUT_MAX_S 1310.72
#elif IS_ENABLED(CONFIG_ADXL362_ACCEL_ODR_100)
#define ADXL362_TIMEOUT_MAX_S 655.36
#elif IS_ENABLED(CONFIG_ADXL362_ACCEL_ODR_200)
#define ADXL362_TIMEOUT_MAX_S 327.68
#elif IS_ENABLED(CONFIG_ADXL362_ACCEL_ODR_400)
#define ADXL362_TIMEOUT_MAX_S 163.84
#endif
#define ADXL362_TIMEOUT_RESOLUTION_MAX 65536
#define DEFAULT_ADXL362_NODE DT_ALIAS(adxl362)
BUILD_ASSERT(DT_NODE_HAS_STATUS(DEFAULT_ADXL362_NODE, okay),
"ADXL362 not specified in DT");
// DEVICE TREE STRUCTURE
const struct device *adxl1362_sens = DEVICE_DT_GET(DEFAULT_ADXL362_NODE);
static int ext_sensors_accelerometer_threshold_set(double threshold, bool upper);
static void trigger_handler(const struct device *dev, const struct sensor_trigger *trig)
{
int err = 0;
switch (trig->type)
{
case SENSOR_TRIG_MOTION:
case SENSOR_TRIG_STATIONARY:
if (sensor_sample_fetch(dev) < 0)
{
LOG_ERR("Sample fetch error");
return;
}
err = sensor_channel_get(dev, SENSOR_CHAN_ACCEL_XYZ, &data[0]);
if (err)
{
LOG_ERR("sensor_channel_get, error: %d", err);
return;
}
printk("x: %.1f, y: %.1f, z: %.1f (m/s^2)\n",
sensor_value_to_double(&data[0]),
sensor_value_to_double(&data[1]),
sensor_value_to_double(&data[2]));
if (trig->type == SENSOR_TRIG_MOTION)
{
printk("Activity detected \n");
}
else
{
printk("Inactivity detected \n");
}
break;
default:
LOG_ERR("Unknown trigger: %d", trig->type);
}
}
void main(void)
{
if (!device_is_ready(adxl1362_sens))
{
LOG_ERR("sensor: device %s not ready", adxl1362_sens->name);
return 0;
}
if (IS_ENABLED(CONFIG_ADXL362_TRIGGER))
{
printk("Configuring triggers \n");
struct sensor_trigger trig_motion = {
.chan = SENSOR_CHAN_ACCEL_XYZ,
.type = SENSOR_TRIG_MOTION,
};
if (sensor_trigger_set(adxl1362_sens, &trig_motion, trigger_handler))
{
LOG_ERR("SENSOR_TRIG_MOTION set error");
}
struct sensor_trigger trig_stationary = {
.chan = SENSOR_CHAN_ACCEL_XYZ,
.type = SENSOR_TRIG_STATIONARY,
};
if (sensor_trigger_set(adxl1362_sens, &trig_stationary, trigger_handler))
{
LOG_ERR("SENSOR_TRIG_STATIONARY set error");
}
ext_sensors_accelerometer_threshold_set(5.0, true);
ext_sensors_accelerometer_threshold_set(0.5, false);
}
}
static int ext_sensors_accelerometer_threshold_set(double threshold, bool upper)
{
int err, input_value;
double range_max_m_s2 = ADXL362_RANGE_MAX_M_S2;
if ((threshold > range_max_m_s2) || (threshold <= 0.0))
{
LOG_ERR("Invalid %s threshold value: %f", upper ? "activity" : "inactivity", threshold);
return -ENOTSUP;
}
/* Convert threshold value into 11-bit decimal value relative
* to the configured measuring range of the accelerometer.
*/
threshold = (threshold *
(ADXL362_THRESHOLD_RESOLUTION_DECIMAL_MAX / range_max_m_s2));
/* Add 0.5 to ensure proper conversion from double to int. */
threshold = threshold + 0.5;
input_value = (int)threshold;
if (input_value >= ADXL362_THRESHOLD_RESOLUTION_DECIMAL_MAX)
{
input_value = ADXL362_THRESHOLD_RESOLUTION_DECIMAL_MAX - 1;
}
else if (input_value < 0)
{
input_value = 0;
}
const struct sensor_value data = {
.val1 = input_value};
enum sensor_attribute attr = upper ? SENSOR_ATTR_UPPER_THRESH : SENSOR_ATTR_LOWER_THRESH;
printk("threshold value to be set : %d \n", data.val1);
/* SENSOR_CHAN_ACCEL_XYZ is not supported by the driver in this case. */
err = sensor_attr_set(adxl1362_sens,
SENSOR_CHAN_ACCEL_X,
attr,
&data);
if (err)
{
LOG_ERR("Failed to set accelerometer threshold value");
LOG_ERR("Device: %s, error: %d",
adxl1362_sens->name, err);
return err;
}
return 0;
}
And my proj.conf:
CONFIG_CBPRINTF_FP_SUPPORT=y # SPI CONFIG_SPI=y CONFIG_SPI_NRFX=y CONFIG_MAIN_STACK_SIZE=4096 # LOG CONFIG_LOG=y # ADXL362 CONFIG_SENSOR=y CONFIG_ADXL362=y CONFIG_ADXL362_TRIGGER_GLOBAL_THREAD=y CONFIG_ADXL362_INTERRUPT_MODE=1 CONFIG_ADXL362_ABS_REF_MODE=1 CONFIG_ADXL362_ACCEL_RANGE_2G=y CONFIG_ADXL362_ACCEL_ODR_400=y
The code above works without any issues. See the serial logs below as I move the device: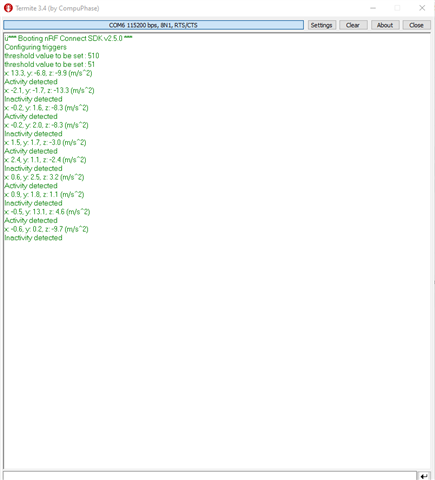
As you can see from my source code above, I use printk statements to print some information to serial terminal. I have decided to replace all printk statements with LOG_DBG.
After replacing all pritnk statements with LOG_DBG, I have ended up with the source code below:
#include <stdio.h>
#include <stdlib.h>
#include <zephyr/kernel.h>
#include <zephyr/drivers/spi.h>
#include <zephyr/device.h>
#include <zephyr/drivers/sensor.h>
#define LOG_LEVEL 4
#include <zephyr/logging/log.h>
LOG_MODULE_REGISTER(main);
struct sensor_value data[3];
/* Convert to s/m2 depending on the maximum measured range used for adxl362. */
#if IS_ENABLED(CONFIG_ADXL362_ACCEL_RANGE_2G)
#define ADXL362_RANGE_MAX_M_S2 19.6133
#elif IS_ENABLED(CONFIG_ADXL362_ACCEL_RANGE_4G)
#define ADXL362_RANGE_MAX_M_S2 39.2266
#elif IS_ENABLED(CONFIG_ADXL362_ACCEL_RANGE_8G)
#define ADXL362_RANGE_MAX_M_S2 78.4532
#endif
/* This is derived from the sensitivity values in the datasheet. */
#define ADXL362_THRESHOLD_RESOLUTION_DECIMAL_MAX 2000
#if IS_ENABLED(CONFIG_ADXL362_ACCEL_ODR_12_5)
#define ADXL362_TIMEOUT_MAX_S 5242.88
#elif IS_ENABLED(CONFIG_ADXL362_ACCEL_ODR_25)
#define ADXL362_TIMEOUT_MAX_S 2621.44
#elif IS_ENABLED(CONFIG_ADXL362_ACCEL_ODR_50)
#define ADXL362_TIMEOUT_MAX_S 1310.72
#elif IS_ENABLED(CONFIG_ADXL362_ACCEL_ODR_100)
#define ADXL362_TIMEOUT_MAX_S 655.36
#elif IS_ENABLED(CONFIG_ADXL362_ACCEL_ODR_200)
#define ADXL362_TIMEOUT_MAX_S 327.68
#elif IS_ENABLED(CONFIG_ADXL362_ACCEL_ODR_400)
#define ADXL362_TIMEOUT_MAX_S 163.84
#endif
#define ADXL362_TIMEOUT_RESOLUTION_MAX 65536
#define DEFAULT_ADXL362_NODE DT_ALIAS(adxl362)
BUILD_ASSERT(DT_NODE_HAS_STATUS(DEFAULT_ADXL362_NODE, okay),
"ADXL362 not specified in DT");
// DEVICE TREE STRUCTURE
const struct device *adxl1362_sens = DEVICE_DT_GET(DEFAULT_ADXL362_NODE);
static int ext_sensors_accelerometer_threshold_set(double threshold, bool upper);
static void trigger_handler(const struct device *dev, const struct sensor_trigger *trig)
{
int err = 0;
switch (trig->type)
{
case SENSOR_TRIG_MOTION:
case SENSOR_TRIG_STATIONARY:
if (sensor_sample_fetch(dev) < 0)
{
LOG_ERR("Sample fetch error");
return;
}
err = sensor_channel_get(dev, SENSOR_CHAN_ACCEL_XYZ, &data[0]);
if (err)
{
LOG_ERR("sensor_channel_get, error: %d", err);
return;
}
LOG_DBG("x: %.1f, y: %.1f, z: %.1f (m/s^2)",
sensor_value_to_double(&data[0]),
sensor_value_to_double(&data[1]),
sensor_value_to_double(&data[2]));
if (trig->type == SENSOR_TRIG_MOTION)
{
LOG_DBG("Activity detected");
}
else
{
LOG_DBG("Inactivity detected");
}
break;
default:
LOG_ERR("Unknown trigger: %d", trig->type);
}
}
void main(void)
{
if (!device_is_ready(adxl1362_sens))
{
LOG_ERR("sensor: device %s not ready", adxl1362_sens->name);
return 0;
}
if (IS_ENABLED(CONFIG_ADXL362_TRIGGER))
{
LOG_DBG("Configuring triggers");
struct sensor_trigger trig_motion = {
.chan = SENSOR_CHAN_ACCEL_XYZ,
.type = SENSOR_TRIG_MOTION,
};
if (sensor_trigger_set(adxl1362_sens, &trig_motion, trigger_handler))
{
LOG_ERR("SENSOR_TRIG_MOTION set error");
}
struct sensor_trigger trig_stationary = {
.chan = SENSOR_CHAN_ACCEL_XYZ,
.type = SENSOR_TRIG_STATIONARY,
};
if (sensor_trigger_set(adxl1362_sens, &trig_stationary, trigger_handler))
{
LOG_ERR("SENSOR_TRIG_STATIONARY set error");
}
ext_sensors_accelerometer_threshold_set(5.0, true);
ext_sensors_accelerometer_threshold_set(0.5, false);
}
}
static int ext_sensors_accelerometer_threshold_set(double threshold, bool upper)
{
int err, input_value;
double range_max_m_s2 = ADXL362_RANGE_MAX_M_S2;
if ((threshold > range_max_m_s2) || (threshold <= 0.0))
{
LOG_ERR("Invalid %s threshold value: %f", upper ? "activity" : "inactivity", threshold);
return -ENOTSUP;
}
/* Convert threshold value into 11-bit decimal value relative
* to the configured measuring range of the accelerometer.
*/
threshold = (threshold *
(ADXL362_THRESHOLD_RESOLUTION_DECIMAL_MAX / range_max_m_s2));
/* Add 0.5 to ensure proper conversion from double to int. */
threshold = threshold + 0.5;
input_value = (int)threshold;
if (input_value >= ADXL362_THRESHOLD_RESOLUTION_DECIMAL_MAX)
{
input_value = ADXL362_THRESHOLD_RESOLUTION_DECIMAL_MAX - 1;
}
else if (input_value < 0)
{
input_value = 0;
}
const struct sensor_value data = {
.val1 = input_value};
enum sensor_attribute attr = upper ? SENSOR_ATTR_UPPER_THRESH : SENSOR_ATTR_LOWER_THRESH;
LOG_DBG("threshold value to be set : %d", data.val1);
/* SENSOR_CHAN_ACCEL_XYZ is not supported by the driver in this case. */
err = sensor_attr_set(adxl1362_sens,
SENSOR_CHAN_ACCEL_X,
attr,
&data);
if (err)
{
LOG_ERR("Failed to set accelerometer threshold value");
LOG_ERR("Device: %s, error: %d",
adxl1362_sens->name, err);
return err;
}
return 0;
}
After flashing the device, I get the following errors: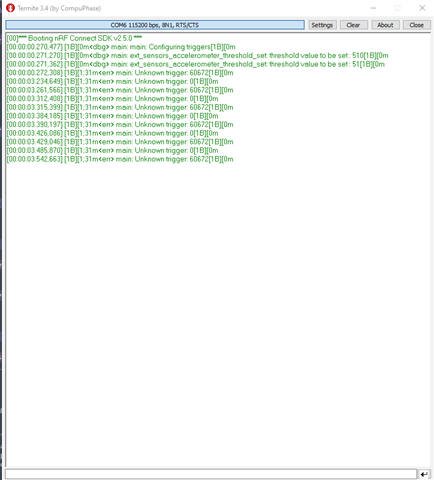
I cannot wrap my head around how can my code stop working when all I did was replace printk statements with LOG_DBG statements. I have even put both of my source codes back to back in diffchecker to check whether I have accidentally changed something else:
I would really appreciate if someone could help me understand this. Thanks!

