Hello DevZone,
My team is developing a wearable that has time constraints which, we believe, are not being respected by Zephyr.
The setup is a nRF52840 based board which is connected to a chip (AS7058A by ams OSRAM) that communicates via I2C.
The chip has an interrupt line which triggers a callback that submits a worker to handle the I2C communiations.
The issue here is the high latency (can be above 2.5ms) between the interrupt rising edge on the chip and its respective detection on the nRF52840 Zephyr based application.
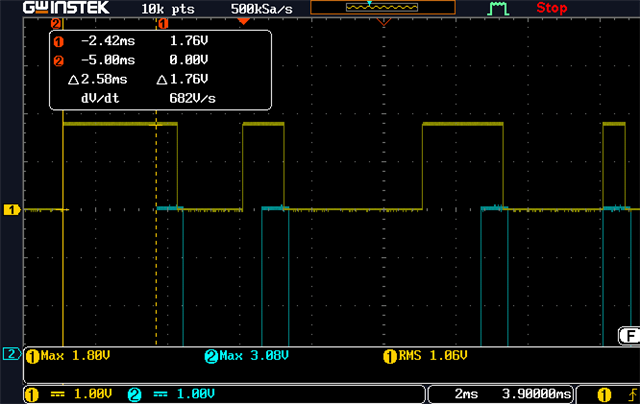
Here is a picture of an oscilloscope measuring the chip interrupt line (yellow) and a pin output (blue) set on interrupt handling (not on the worker).
As shown, interrupt detection has a variable latency and can go above 2.5ms, but sometimes it can be a few us.
The code for this is as follows:
Device tree configuration:
&gpio1 {
status = "okay";
as7058a {
compatible = "gpio-keys";
as7058a_int: as7058a_int {
gpios = <&gpio1 03 (GPIO_ACTIVE_HIGH)>;
label = "AS7058A interrupt";
};
};
};
Pin configuration and callback registration:
/* Configure interrupt pin: Input */
if ((ERR_SUCCESS == result) && (gpio_pin_configure_dt(&as7058a_int_speq, GPIO_INPUT) != 0))
{
result = ERR_SYSTEM_CONFIG;
}
/* Configure interrupt pin: Triggering on rising edge */
if ((ERR_SUCCESS == result) && (gpio_pin_interrupt_configure_dt(&as7058a_int_speq, GPIO_INT_EDGE_RISING) != 0))
{
result = ERR_SYSTEM_CONFIG;
}
// Register AS7058A interrupt callback
gpio_init_callback(&as7058a_int_cb_data, as7058a_int_callback, BIT(as7058a_int_speq.pin));
result = gpio_add_callback(as7058a_int_speq.port, &as7058a_int_cb_data);
Interrupt callback:
/*! Interrupt service routine of the interrupt pin */
static void as7058a_int_callback(const struct device *dev, struct gpio_callback *cb, uint32_t pins)
// static void interrupt_callback()
{
if (pins & BIT(as7058a_int_speq.pin))
{
nrf_gpio_pin_set(27);
if (NULL != g_device_config.callback)
{
k_work_submit_to_queue(&int_cb_work_q, &int_cb_work);
}
}
}
We have added CONFIG_ZERO_LATENCY_IRQS to prj.conf, but apparently this doesn't affect GPIOTE.
How can we reduce this latency to be constant and as low as a few microsseconds?
We are using SDK v2.6.0.
Thanks in advance.