Hello DevZone,
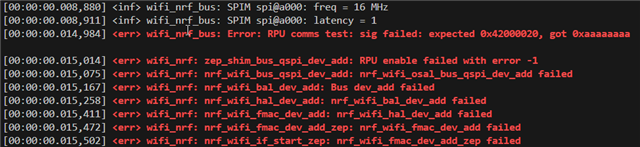
I have an nRF5340 devkit along with an nRF7002EK, and I'm looking to upgrade from SDK version 2.6.1 to 2.6.4. However, I'm facing an issue. In version 2.6.2, a new check was introduced in nrf\drivers\wifi\nrf700x\src\qspi\src\rpu_hw_if.c, specifically the rpu_validate_comms() function added to rpu_enable(). This check fails for me when I use an SPI frequency other than 8 MHz for communication with the nRF7002-EK.
To change the frequency I use the following property of nrf700x node in my device tree overlay: spi-max-frequency = <DT_FREQ_M(16)>
Is this intended behavior, or could it be a bug?
Also, I'm attaching a screenshot of the above mentioned failure:
Many thanks!
Ladivin