Hello,
I have some questions regarding bluetooth low energy and the NRF51 series. [list=1]1) I have to synchronise maximum 17 sensors, so i will maximum need 4 masters: 3 piconets connected towards one master. Is this possible with ble? In my opinion i see 2 possibility's to synchronise the sensors: let the host advertise, if sensornodes receive the advertisement packet start a timer. Or each connection interval let the host write a timestamp(with acknowledge) and let the sensors send their data(1 packet/ 7.5ms interval). [/list]
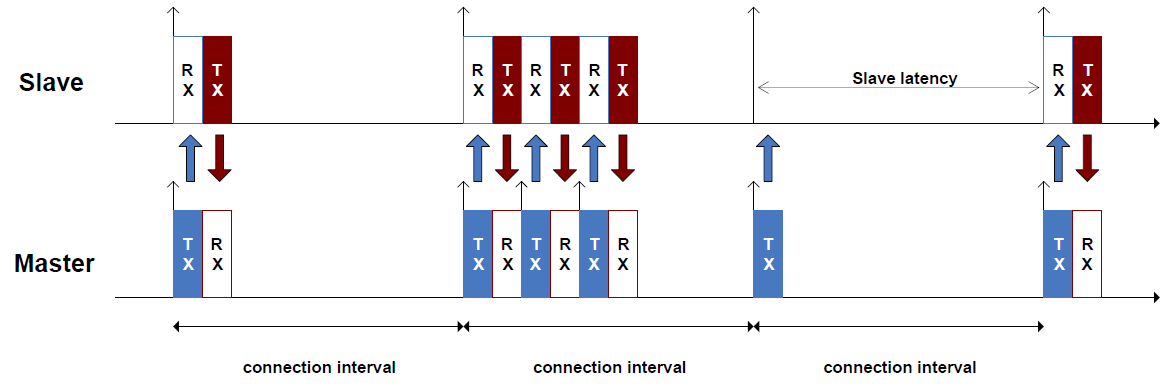
[list=2]2) The NRF51 series can handle 6 packets transmitting or receiving, so is it possible to do one normal write (so with acknowledge) to get in the same interval the ack packet back or will this always be the next interval? For example i took the picture from the nordic tour presentations in my attachments. At the second interval one packet transmits from master to slave and immediately after this the slave transmits one packet (can this packet be the acknowledge?). Or should i take in account the next interval i can only send 5 packet transmissions and 1 reponse(the acknowledge)? [/list]
Regards, Pascal