Hi,
I am using nRF52832 soc to develop my project. with nRF5_SDK_15.3 . SES file
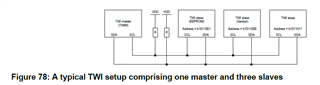
I need to connect both BMI160 accelerometer sensor and AT24C512 EEPROM ic in TWI.
how to use TWI with this. guide me to use both at a time.
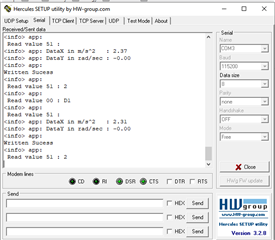
BMI160 separately i can read the data.
but i can't read while connect to AT24C512