
Hi Devzone!
I'm using LM5(BG96) LTE modem to publish the mqtt message.
When I test it at PC terminal, It works very well. There is no problem.
However, when I send the message at the nRF52840 over uart, I can't publish the message. By the way, opening the server and connection don't have any problem.
I think the reason is I can't get '>' response from the modem, so the message can't be sent to AWS or 0x1A (which is ctrl-z) isn't sent normally.
Here is the whole code of our product.
/**
* Copyright (c) 2014 - 2019, Nordic Semiconductor ASA
*
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without modification,
* are permitted provided that the following conditions are met:
*
* 1. Redistributions of source code must retain the above copyright notice, this
* list of conditions and the following disclaimer.
*
* 2. Redistributions in binary form, except as embedded into a Nordic
* Semiconductor ASA integrated circuit in a product or a software update for
* such product, must reproduce the above copyright notice, this list of
* conditions and the following disclaimer in the documentation and/or other
* materials provided with the distribution.
*
* 3. Neither the name of Nordic Semiconductor ASA nor the names of its
* contributors may be used to endorse or promote products derived from this
* software without specific prior written permission.
*
* 4. This software, with or without modification, must only be used with a
* Nordic Semiconductor ASA integrated circuit.
*
* 5. Any software provided in binary form under this license must not be reverse
* engineered, decompiled, modified and/or disassembled.
*
* THIS SOFTWARE IS PROVIDED BY NORDIC SEMICONDUCTOR ASA "AS IS" AND ANY EXPRESS
* OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES
* OF MERCHANTABILITY, NONINFRINGEMENT, AND FITNESS FOR A PARTICULAR PURPOSE ARE
* DISCLAIMED. IN NO EVENT SHALL NORDIC SEMICONDUCTOR ASA OR CONTRIBUTORS BE
* LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
* CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE
* GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION)
* HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT
* OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
/**
* @brief BLE LED Button Service central and client application main file.
*
* This example can be a central for up to 8 peripherals.
* The peripheral is called ble_app_blinky and can be found in the ble_peripheral
* folder.
*/
#include <stdbool.h>
#include <stdint.h>
#include <stdio.h>
#include <string.h>
#include "nordic_common.h"
#include "compiler_abstraction.h"
#include "nrf.h"
#include "app_error.h"
#include "app_uart.h"
#include "nrf_sdh.h"
#include "nrf_sdh_ble.h"
#include "app_timer.h"
#include "bsp_btn_ble.h"
#include "ble.h"
#include "ble_hci.h"
#include "ble_advertising.h"
#include "ble_conn_params.h"
#include "ble_db_discovery.h"
#include "app_timer.h"
#include "app_util.h"
#include "ble_nus_c.h"
#include "ble_conn_state.h"
#include "nrf_ble_gatt.h"
#include "nrf_pwr_mgmt.h"
#include "nrf_ble_scan.h"
#include "nrf_drv_ppi.h"
#include "nrf_drv_saadc.h"
#include "nrf_drv_timer.h"
#include "nrf_delay.h"
#include "nrf_drv_twi.h"
#include "boards.h"
#include "nrf_log.h"
#include "nrf_log_ctrl.h"
#include "nrf_log_default_backends.h"
#include "ArducamMini2MP.h"
#if defined (UART_PRESENT)
#include "nrf_uart.h"
#endif
#if defined (UARTE_PRESENT)
#include "nrf_uarte.h"
#endif
#define APP_BLE_CONN_CFG_TAG 1 /**< Tag that refers to the BLE stack configuration that is set with @ref sd_ble_cfg_set. The default tag is @ref APP_BLE_CONN_CFG_TAG. */
#define APP_BLE_OBSERVER_PRIO 3 /**< BLE observer priority of the application. There is no need to modify this value. */
#define UART_TX_BUF_SIZE 256 /**< UART TX buffer size. */
#define UART_RX_BUF_SIZE 256 /**< UART RX buffer size. */
#define CENTRAL_SCANNING_LED BSP_BOARD_LED_0
#define CENTRAL_CONNECTED_LED BSP_BOARD_LED_1
#define LEDBUTTON_LED BSP_BOARD_LED_2 /**< LED to indicate a change of state of the Button characteristic on the peer. */
#define LEDBUTTON_BUTTON BSP_BUTTON_0 /**< Button that writes to the LED characteristic of the peer. */
#define BUTTON_DETECTION_DELAY APP_TIMER_TICKS(50) /**< Delay from a GPIOTE event until a button is reported as pushed (in number of timer ticks). */
#define NUS_SERVICE_UUID_TYPE BLE_UUID_TYPE_VENDOR_BEGIN /**< UUID type for the Nordic UART Service (vendor specific). */
#define ECHOBACK_BLE_UART_DATA 0 /**< The flag whether central sends peripheral the received message again */
#define SAMPLES_IN_BUFFER 1 /**< The number of analog sensors */
#define SAADC_SAMPLE_RATE 250 /**< The sampling rate of saadc */
#define BAT_PIN NRF_SAADC_INPUT_VDD /**< The hadware pin for battery(vdd) */
#define BAT_CHANNEL 0 /**< The saadc module channel of battery(vdd) */
#define ADC_REF_VOLTAGE_IN_MILLIVOLTS 600 /**< Reference voltage (in milli volts) used by ADC while doing conversion. */
#define ADC_PRE_SCALING_COMPENSATION 6 /**< The ADC is configured to use VDD with 1/3 prescaling as input. And hence the result of conversion is to be multiplied by 3 to get the actual value of the battery voltage.*/
#define DIODE_FWD_VOLT_DROP_MILLIVOLTS 270 /**< Typical forward voltage drop of the diode . */
#define ADC_RES_10BIT 1024 /**< Maximum digital value for 10-bit ADC conversion. */
#define ADC_RESULT_IN_MILLI_VOLTS(ADC_VALUE)\
((((ADC_VALUE) * ADC_REF_VOLTAGE_IN_MILLIVOLTS) / ADC_RES_10BIT) * ADC_PRE_SCALING_COMPENSATION) /**< The mathematical expression for converting the value of saadc(vdd) as milli volts unit. */
#define NRF_POWER_EN 12
#define LM5_ONOFF_RESET
#define BAT_LIMIT 35
#define TIMECHECK /**< The flag of checking execution time. */
#define PCA10056_USE_FRONT_HEADER 1 /**< Use the front header (P24) for the camera module. Requires SB10-15 and SB20-25 to be soldered/cut, as described in the readme. */
NRF_BLE_GATT_DEF(m_gatt); /**< GATT module instance. */
BLE_NUS_C_ARRAY_DEF(m_ble_nus_c, NRF_SDH_BLE_TOTAL_LINK_COUNT);
BLE_DB_DISCOVERY_ARRAY_DEF(m_db_disc, NRF_SDH_BLE_TOTAL_LINK_COUNT); /**< Database discovery module instances. */
NRF_BLE_SCAN_DEF(m_scan); /**< Scanning Module instance. */
APP_TIMER_DEF(m_repeated_timer_id);
APP_TIMER_DEF(m_psm_timer_id);
static nrf_saadc_channel_config_t ch_config_bat = NRF_DRV_SAADC_DEFAULT_CHANNEL_CONFIG_SE(BAT_PIN); /**< The saadc cnannel configuration of battery(vdd). */
static const nrf_drv_timer_t m_timer = NRF_DRV_TIMER_INSTANCE(3); /**< The channel of used timer triver. */
static char const m_target_periph_name[] = "Nordic_Blinky"; /**< Name of the device to try to connect to. This name is searched for in the scanning report data. */
static nrf_saadc_value_t m_buffer_pool[2][SAMPLES_IN_BUFFER]; /**< The storage of 4 values which are results of saadc. */
static nrf_ppi_channel_t m_ppi_channel; /**< The ppi instance for interconnecting timer and saadc. */
static uint16_t m_ble_nus_max_data_len = BLE_GATT_ATT_MTU_DEFAULT - OPCODE_LENGTH - HANDLE_LENGTH; /**< The maximum length of ble data. */
static uint8_t m_ble_nus_c_count; /**< The instance of present connected count of ble devices. */
#ifdef TIMECHECK
static uint32_t start; /**< The time recorded when program starts. */
static uint32_t stop; /**< The time recorded when program terminates. */
static uint32_t elapsed; /**< The execution time. */
#endif
static uint8_t m_new_command_received = 0;
static uint8_t m_new_resolution, m_new_phy;
static arducam_mini_2mp_init_t m_camera_init;
static uint8_t saadc_counter = 0;
static uint8_t test_counter = 0;
static uint8_t temp_array[BLE_NUS_MAX_DATA_LEN];
static bool pwr_saving_mode = false;
static bool arducam_stop = false;
static bool lte_lock = false;
static bool flash_on = false;
static bool cam_working = false;
static ble_uuid_t const m_nus_uuid = /**< Universally unique service identifiers. */
{
.uuid = BLE_UUID_DEVICE_INFORMATION_SERVICE,
.type = BLE_UUID_TYPE_BLE
};
enum {APP_CMD_NOCOMMAND = 0, APP_CMD_SINGLE_CAPTURE, APP_CMD_CHANGE_RESOLUTION};
typedef enum
{
AT_OK,
AWS_OPEN,
AWS_CONN,
MQTT_SUB,
MQTT_PUB,
MQTT_INPUT,
SRV_RDY
} lte_response_mode;
typedef enum
{
DIGGING,
FLAME,
TILT,
BATTERY,
CHIPTEMP,
FLASH,
FLASHOFF
} pri_situation_mode;
void board_init(void)
{
nrf_gpio_cfg_output(NRF_POWER_EN);
nrf_gpio_pin_set(NRF_POWER_EN);
nrf_gpio_cfg_output(11);
nrf_gpio_pin_set(11);
// nrf_gpio_cfg_output(32 + 2);
// nrf_gpio_pin_set(32 + 2);
// nrf_gpio_cfg_output(32 + 3);
// nrf_gpio_pin_set(32 + 3);
// nrf_gpio_pin_clear(32 + 2);
// nrf_delay_ms(150);
// nrf_gpio_pin_set(32 + 2);
}
void flash_evt_handler(int flash_evt)
{
uint8_t control_msg[3];
uint16_t length;
switch (flash_evt)
{
case 1:
if(!flash_on)
{
flash_on = true;
sprintf(control_msg, "1");
}
break;
case 2:
if(flash_on)
{
flash_on = false;
sprintf(control_msg, "2");
}
break;
default:
break;
}
for(int i=0; i<3; i++)
{
length = sizeof(control_msg);
ble_nus_c_string_send(&m_ble_nus_c[i], control_msg, length);
}
}
//needs the enlargement and battery up down / parsing / multiple uart_init in lte_psm_disable() (flag will be needed.)
void sit_evt_handler(uint8_t * msg)
{
int situation = atoi(msg);
// while(lte_lock);
// lte_psm_disable();
// lte_check();
// lte_setup();
switch (situation)
{
case DIGGING:
// publish_mqtt("digging\r");
printf("DIGGING\r\n");
if (!cam_working) camera_function();
flash_on = false;
// flash_evt_handler(1);
break;
case FLAME:
printf("FLAME\r\n");
// publish_mqtt("flame\r");
break;
case TILT:
// publish_mqtt("tilt\r");
break;
case BATTERY:
// publish_mqtt("battery\r");
break;
case CHIPTEMP:
// publish_mqtt("chiptemp\r");
break;
case FLASH:
// printf("FLASH\r\n");
// if (!cam_working) camera_function();
break;
case FLASHOFF:
break;
default:
break;
}
// lte_psm_enable();
}
/**@brief Function for handling asserts in the SoftDevice.
*
* @details This function is called in case of an assert in the SoftDevice.
*
* @warning This handler is only an example and is not meant for the final product. You need to analyze
* how your product is supposed to react in case of an assert.
* @warning On assert from the SoftDevice, the system can only recover on reset.
*
* @param[in] line_num Line number of the failing assert call.
* @param[in] p_file_name File name of the failing assert call.
*/
void assert_nrf_callback(uint16_t line_num, const uint8_t * p_file_name)
{
app_error_handler(0xDEADBEEF, line_num, p_file_name);
}
/**@brief Function for initializing the LEDs.
*
* @details Initializes all LEDs used by the application.
*/
static void leds_init(void)
{
bsp_board_init(BSP_INIT_LEDS);
}
/**@brief Function for handling Queued Write Module errors.
*
* @details A pointer to this function will be passed to each service which may need to inform the
* application about an error.
*
* @param[in] nrf_error Error code containing information about what went wrong.
*/
static void scan_evt_handler(scan_evt_t const * p_scan_evt)
{
ret_code_t err_code;
switch(p_scan_evt->scan_evt_id)
{
case NRF_BLE_SCAN_EVT_CONNECTING_ERROR:
{
err_code = p_scan_evt->params.connecting_err.err_code;
APP_ERROR_CHECK(err_code);
} break;
default:
break;
}
}
/**@brief Function for initializing the scanning and setting the filters. */
static void scan_init(void)
{
ret_code_t err_code;
nrf_ble_scan_init_t init_scan;
memset(&init_scan, 0, sizeof(init_scan));
init_scan.connect_if_match = true;
init_scan.conn_cfg_tag = APP_BLE_CONN_CFG_TAG;
err_code = nrf_ble_scan_init(&m_scan, &init_scan, scan_evt_handler);
APP_ERROR_CHECK(err_code);
err_code = nrf_ble_scan_filter_set(&m_scan, SCAN_UUID_FILTER, &m_nus_uuid);
APP_ERROR_CHECK(err_code);
err_code = nrf_ble_scan_filters_enable(&m_scan, NRF_BLE_SCAN_UUID_FILTER, false);
APP_ERROR_CHECK(err_code);
}
/**@brief Function for starting scanning. */
static void scan_start(void)
{
ret_code_t ret;
sd_ble_gap_scan_stop();
NRF_LOG_INFO("Start scanning for device name %s.", (uint32_t)m_target_periph_name);
ret = nrf_ble_scan_start(&m_scan);
APP_ERROR_CHECK(ret);
// Turn on the LED to signal scanning.
bsp_board_led_on(CENTRAL_SCANNING_LED);
}
static void ble_nus_chars_received_uart_print(uint8_t * p_data, uint16_t data_len)
{
ret_code_t ret_val;
NRF_LOG_DEBUG("Receiving data.");
NRF_LOG_HEXDUMP_DEBUG(p_data, data_len);
for (uint32_t i = 0; i < data_len; i++)
{
do
{
ret_val = app_uart_put(p_data[i]);
if ((ret_val != NRF_SUCCESS) && (ret_val != NRF_ERROR_BUSY))
{
NRF_LOG_ERROR("app_uart_put failed for index 0x%04x.", i);
APP_ERROR_CHECK(ret_val);
}
} while (ret_val == NRF_ERROR_BUSY);
}
if (p_data[data_len-1] == '\r')
{
while (app_uart_put('\n') == NRF_ERROR_BUSY);
}
}
/**@brief Function for handling app_uart events.
*
* @details This function receives a single character from the app_uart module and appends it to
* a string. The string is sent over BLE when the last character received is a
* 'new line' '\n' (hex 0x0A) or if the string reaches the maximum data length.
*/
void uart_event_handle(app_uart_evt_t * p_event)
{
static uint8_t data_array[BLE_NUS_MAX_DATA_LEN];
static uint8_t index = 0;
uint32_t err_code;
switch (p_event->evt_type)
{
case APP_UART_DATA_READY:
UNUSED_VARIABLE(app_uart_get(&data_array[index]));
index++;
if ((data_array[index - 1] == '\n') ||
(index >= (m_ble_nus_max_data_len)))
{
if(index > 1)
{
NRF_LOG_INFO("%s", NRF_LOG_PUSH(data_array));
strcat(temp_array,data_array);
memset(data_array,0,BLE_NUS_MAX_DATA_LEN);
index = 0;
}
}
break;
case APP_UART_COMMUNICATION_ERROR:
APP_ERROR_HANDLER(p_event->data.error_communication);
break;
case APP_UART_FIFO_ERROR:
APP_ERROR_HANDLER(p_event->data.error_code);
break;
default:
break;
}
}
/**@brief Callback handling Nordic UART Service (NUS) client events.
*
* @details This function is called to notify the application of NUS client events.
*
* @param[in] p_ble_nus_c NUS client handle. This identifies the NUS client.
* @param[in] p_ble_nus_evt Pointer to the NUS client event.
*/
/**@snippet [Handling events from the ble_nus_c module] */
static void ble_nus_c_evt_handler(ble_nus_c_t * p_ble_nus_c, ble_nus_c_evt_t const * p_ble_nus_evt)
{
ret_code_t err_code;
switch (p_ble_nus_evt->evt_type)
{
case BLE_NUS_C_EVT_DISCOVERY_COMPLETE:
NRF_LOG_INFO("Discovery complete.");
err_code = ble_nus_c_tx_notif_enable(p_ble_nus_c);
APP_ERROR_CHECK(err_code);
NRF_LOG_INFO("Connected to device with Nordic UART Service.");
if(err_code != NRF_ERROR_BUSY)
{
APP_ERROR_CHECK(err_code);
}
break;
case BLE_NUS_C_EVT_NUS_TX_EVT:
sit_evt_handler(p_ble_nus_evt->p_data);
// printf(p_ble_nus_evt->p_data);
break;
case BLE_NUS_C_EVT_DISCONNECTED:
NRF_LOG_INFO("Disconnected.");
scan_start();
break;
}
}
/**
* @brief Function for handling shutdown events.
*
* @param[in] event Shutdown type.
*/
static bool shutdown_handler(nrf_pwr_mgmt_evt_t event)
{
ret_code_t err_code;
err_code = bsp_indication_set(BSP_INDICATE_IDLE);
APP_ERROR_CHECK(err_code);
switch (event)
{
case NRF_PWR_MGMT_EVT_PREPARE_WAKEUP:
// Prepare wakeup buttons.
err_code = bsp_btn_ble_sleep_mode_prepare();
APP_ERROR_CHECK(err_code);
break;
default:
break;
}
return true;
}
NRF_PWR_MGMT_HANDLER_REGISTER(shutdown_handler, APP_SHUTDOWN_HANDLER_PRIORITY);
/**@brief Function for initializing nRF uart service that will be used by ble.
*/
static void nus_c_init(void)
{
ret_code_t err_code;
ble_nus_c_init_t init;
init.evt_handler = ble_nus_c_evt_handler;
for (m_ble_nus_c_count = 0; m_ble_nus_c_count < NRF_SDH_BLE_TOTAL_LINK_COUNT; m_ble_nus_c_count++)
{
err_code = ble_nus_c_init(&m_ble_nus_c[m_ble_nus_c_count], &init);
APP_ERROR_CHECK(err_code);
}
m_ble_nus_c_count = 0;
}
/**@brief Function for handling BLE events.
*
* @param[in] p_ble_evt Bluetooth stack event.
* @param[in] p_context Unused.
*/
static void ble_evt_handler(ble_evt_t const * p_ble_evt, void * p_context)
{
ret_code_t err_code;
// For readability.
ble_gap_evt_t const * p_gap_evt = &p_ble_evt->evt.gap_evt;
switch (p_ble_evt->header.evt_id)
{
// Upon connection, check which peripheral is connected, initiate DB
// discovery, update LEDs status, and resume scanning, if necessary.
case BLE_GAP_EVT_CONNECTED:
{
NRF_LOG_INFO("Connection 0x%x established, starting DB discovery.",
p_gap_evt->conn_handle);
APP_ERROR_CHECK_BOOL(p_gap_evt->conn_handle < NRF_SDH_BLE_CENTRAL_LINK_COUNT);
err_code = ble_nus_c_handles_assign(&m_ble_nus_c[p_gap_evt->conn_handle], p_gap_evt->conn_handle, NULL);
APP_ERROR_CHECK(err_code);
err_code = ble_db_discovery_start(&m_db_disc[p_gap_evt->conn_handle],
p_gap_evt->conn_handle);
if (err_code != NRF_ERROR_BUSY)
{
APP_ERROR_CHECK(err_code);
}
// Update LEDs status and check whether it is needed to look for more
// peripherals to connect to.
bsp_board_led_on(CENTRAL_CONNECTED_LED);
if (ble_conn_state_central_conn_count() == NRF_SDH_BLE_CENTRAL_LINK_COUNT)
{
bsp_board_led_off(CENTRAL_SCANNING_LED);
}
else
{
// Resume scanning.
bsp_board_led_on(CENTRAL_SCANNING_LED);
scan_start();
}
} break; // BLE_GAP_EVT_CONNECTED
// Upon disconnection, reset the connection handle of the peer that disconnected, update
// the LEDs status and start scanning again.
case BLE_GAP_EVT_DISCONNECTED:
{
NRF_LOG_INFO("LBS central link 0x%x disconnected (reason: 0x%x)",
p_gap_evt->conn_handle,
p_gap_evt->params.disconnected.reason);
if (ble_conn_state_central_conn_count() == 0)
{
// Turn off the LED that indicates the connection.
bsp_board_led_off(CENTRAL_CONNECTED_LED);
}
// Start scanning.
scan_start();
// Turn on the LED for indicating scanning.
bsp_board_led_on(CENTRAL_SCANNING_LED);
} break;
case BLE_GAP_EVT_TIMEOUT:
{
// Timeout for scanning is not specified, so only the connection requests can time out.
if (p_gap_evt->params.timeout.src == BLE_GAP_TIMEOUT_SRC_CONN)
{
scan_start();
NRF_LOG_DEBUG("Connection request timed out.");
}
} break;
case BLE_GAP_EVT_CONN_PARAM_UPDATE_REQUEST:
{
NRF_LOG_DEBUG("BLE_GAP_EVT_CONN_PARAM_UPDATE_REQUEST.");
// Accept parameters requested by peer.
err_code = sd_ble_gap_conn_param_update(p_gap_evt->conn_handle,
&p_gap_evt->params.conn_param_update_request.conn_params);
APP_ERROR_CHECK(err_code);
} break;
case BLE_GAP_EVT_PHY_UPDATE_REQUEST:
{
NRF_LOG_DEBUG("PHY update request.");
ble_gap_phys_t const phys =
{
.rx_phys = BLE_GAP_PHY_AUTO,
.tx_phys = BLE_GAP_PHY_AUTO,
};
err_code = sd_ble_gap_phy_update(p_ble_evt->evt.gap_evt.conn_handle, &phys);
APP_ERROR_CHECK(err_code);
} break;
case BLE_GATTC_EVT_TIMEOUT:
{
// Disconnect on GATT client timeout event.
NRF_LOG_DEBUG("GATT client timeout.");
err_code = sd_ble_gap_disconnect(p_ble_evt->evt.gattc_evt.conn_handle,
BLE_HCI_REMOTE_USER_TERMINATED_CONNECTION);
APP_ERROR_CHECK(err_code);
} break;
case BLE_GATTS_EVT_TIMEOUT:
{
// Disconnect on GATT server timeout event.
NRF_LOG_DEBUG("GATT server timeout.");
err_code = sd_ble_gap_disconnect(p_ble_evt->evt.gatts_evt.conn_handle,
BLE_HCI_REMOTE_USER_TERMINATED_CONNECTION);
APP_ERROR_CHECK(err_code);
} break;
default:
// No implementation needed.
break;
}
}
/**@brief Function for initializing the BLE stack.
*
* @details Initializes the SoftDevice and the BLE event interrupts.
*/
static void ble_stack_init(void)
{
ret_code_t err_code;
err_code = nrf_sdh_enable_request();
APP_ERROR_CHECK(err_code);
// Configure the BLE stack using the default settings.
// Fetch the start address of the application RAM.
uint32_t ram_start = 0;
err_code = nrf_sdh_ble_default_cfg_set(APP_BLE_CONN_CFG_TAG, &ram_start);
APP_ERROR_CHECK(err_code);
// Enable BLE stack.
err_code = nrf_sdh_ble_enable(&ram_start);
APP_ERROR_CHECK(err_code);
// Register a handler for BLE events.
NRF_SDH_BLE_OBSERVER(m_ble_observer, APP_BLE_OBSERVER_PRIO, ble_evt_handler, NULL);
}
/**@brief Function for handling database discovery events.
*
* @details This function is a callback function to handle events from the database discovery module.
* Depending on the UUIDs that are discovered, this function forwards the events
* to their respective services.
*
* @param[in] p_event Pointer to the database discovery event.
*/
static void db_disc_handler(ble_db_discovery_evt_t * p_evt)
{
ble_nus_c_on_db_disc_evt(&m_ble_nus_c[p_evt->conn_handle], p_evt);
}
/** @brief Database discovery initialization.
*/
static void db_discovery_init(void)
{
ret_code_t err_code = ble_db_discovery_init(db_disc_handler);
APP_ERROR_CHECK(err_code);
}
/**@brief Function for initializing power management.
*/
static void power_management_init(void)
{
ret_code_t err_code;
err_code = nrf_pwr_mgmt_init();
APP_ERROR_CHECK(err_code);
}
/**@brief Function for handling the idle state (main loop).
*
* @details This function handles any pending log operations, then sleeps until the next event occurs.
*/
static void idle_state_handle(void)
{
if (NRF_LOG_PROCESS() == false)
{
nrf_pwr_mgmt_run();
}
}
/** @brief Function for initializing the log module.
*/
static void log_init(void)
{
ret_code_t err_code = NRF_LOG_INIT(NULL);
APP_ERROR_CHECK(err_code);
NRF_LOG_DEFAULT_BACKENDS_INIT();
}
/** @brief Function for initializing the timer.
*/
static void timer_init(void)
{
ret_code_t err_code = app_timer_init();
APP_ERROR_CHECK(err_code);
}
/**@brief Application main function.
*/
void timer_handler(nrf_timer_event_t event_type, void * p_context)
{
}
/**@brief Function for initializing the GATT module.
*/
void gatt_evt_handler(nrf_ble_gatt_t * p_gatt, nrf_ble_gatt_evt_t const * p_evt)
{
if (p_evt->evt_id == NRF_BLE_GATT_EVT_ATT_MTU_UPDATED)
{
NRF_LOG_INFO("ATT MTU exchange completed.");
m_ble_nus_max_data_len = p_evt->params.att_mtu_effective - OPCODE_LENGTH - HANDLE_LENGTH;
NRF_LOG_INFO("Ble NUS max data length set to 0x%X(%d)", m_ble_nus_max_data_len, m_ble_nus_max_data_len);
}
}
/**@brief Function for initializing the GATT library. */
void gatt_init(void)
{
ret_code_t err_code;
err_code = nrf_ble_gatt_init(&m_gatt, gatt_evt_handler);
APP_ERROR_CHECK(err_code);
err_code = nrf_ble_gatt_att_mtu_central_set(&m_gatt, NRF_SDH_BLE_GATT_MAX_MTU_SIZE);
APP_ERROR_CHECK(err_code);
}
/**@snippet [Handling the data received over UART] */
/**@brief Function for initializing the UART module.
*/
static void uart_init(void)
{
ret_code_t err_code;
app_uart_comm_params_t const comm_params =
{
.rx_pin_no = RX_PIN_NUMBER,
.tx_pin_no = TX_PIN_NUMBER,
.rts_pin_no = RTS_PIN_NUMBER,
.cts_pin_no = CTS_PIN_NUMBER,
.flow_control = APP_UART_FLOW_CONTROL_DISABLED,
.use_parity = false,
.baud_rate = UART_BAUDRATE_BAUDRATE_Baud115200
};
APP_UART_FIFO_INIT(&comm_params,
UART_RX_BUF_SIZE,
UART_TX_BUF_SIZE,
uart_event_handle,
APP_IRQ_PRIORITY_LOWEST,
err_code);
APP_ERROR_CHECK(err_code);
}
/**@snippet [UART Initialization] */
/**@brief Function for initializing the sampling event of saadc(Successive approximation analog-to-digital converter)
*/
void saadc_sampling_event_init(void)
{
ret_code_t err_code;
err_code = nrf_drv_ppi_init();
APP_ERROR_CHECK(err_code);
nrf_drv_timer_config_t timer_cfg = NRF_DRV_TIMER_DEFAULT_CONFIG;
timer_cfg.frequency = NRF_TIMER_FREQ_31250Hz;
err_code = nrf_drv_timer_init(&m_timer, &timer_cfg, timer_handler);
APP_ERROR_CHECK(err_code);
/* setup m_timer for compare event every 400ms */
uint32_t ticks = nrf_drv_timer_ms_to_ticks(&m_timer, 1000);
nrf_drv_timer_extended_compare(&m_timer,
NRF_TIMER_CC_CHANNEL2,
ticks,
NRF_TIMER_SHORT_COMPARE2_CLEAR_MASK,
false);
nrf_drv_timer_enable(&m_timer);
uint32_t timer_compare_event_addr = nrf_drv_timer_compare_event_address_get(&m_timer,
NRF_TIMER_CC_CHANNEL2);
uint32_t saadc_sample_task_addr = nrf_drv_saadc_sample_task_get();
/* setup ppi channel so that timer compare event is triggering sample task in SAADC */
err_code = nrf_drv_ppi_channel_alloc(&m_ppi_channel);
APP_ERROR_CHECK(err_code);
err_code = nrf_drv_ppi_channel_assign(m_ppi_channel,
timer_compare_event_addr,
saadc_sample_task_addr);
APP_ERROR_CHECK(err_code);
}
/**@brief Function for enabling sampling event of saadc
*/
void saadc_sampling_event_enable(void)
{
ret_code_t err_code = nrf_drv_ppi_channel_enable(m_ppi_channel);
APP_ERROR_CHECK(err_code);
}
/**@brief Function for handling the event of saadc sampling result
*
* @param[in] event Event generated by analog-to-digital convert.
*/
void saadc_callback(nrf_drv_saadc_evt_t const * p_event)
{
if (p_event->type == NRF_DRV_SAADC_EVT_DONE)
{
ret_code_t err_code;
nrf_saadc_value_t bat_result;
uint16_t batt_lvl_in_milli_volts;
uint8_t percentage_batt_lvl;
saadc_counter++;
test_counter++;
char saadc_temp[30];
static uint8_t nus_temp2[30];
err_code = nrf_drv_saadc_buffer_convert(p_event->data.done.p_buffer, SAMPLES_IN_BUFFER);
APP_ERROR_CHECK(err_code);
bat_result = p_event->data.done.p_buffer[BAT_CHANNEL];
batt_lvl_in_milli_volts = ADC_RESULT_IN_MILLI_VOLTS(bat_result) +
DIODE_FWD_VOLT_DROP_MILLIVOLTS;
percentage_batt_lvl = battery_level_in_percent(batt_lvl_in_milli_volts);
if(test_counter < 30) pwr_mgmt(percentage_batt_lvl);
else if(test_counter < 60) pwr_mgmt(30);
else test_counter = 0;
// sprintf(saadc_temp, "master : %d", percentage_batt_lvl);
// NRF_LOG_INFO("%s\n", saadc_temp);
if(saadc_counter == 10)
{
NRF_LOG_INFO("saadc stop\n");
nrf_drv_ppi_channel_disable(m_ppi_channel);
nrf_drv_timer_disable(&m_timer);
nrf_saadc_task_trigger(NRF_SAADC_TASK_STOP);
nrf_saadc_event_clear(NRF_SAADC_EVENT_STARTED);
nrf_saadc_event_clear(NRF_SAADC_EVENT_END);
nrf_saadc_disable();
nrf_gpio_pin_clear(NRF_POWER_EN);
saadc_counter = 0;
}
}
}
/**@brief Function for initializing the saadc
*/
void saadc_init(void)
{
ret_code_t err_code;
nrf_drv_saadc_config_t saadc_config = NRF_DRV_SAADC_DEFAULT_CONFIG;
saadc_config.resolution = NRF_SAADC_RESOLUTION_14BIT;
ch_config_bat.gain = NRF_SAADC_GAIN1_4;
ch_config_bat.reference = NRF_SAADC_REFERENCE_VDD4;
err_code = nrf_drv_saadc_init(&saadc_config, saadc_callback);
APP_ERROR_CHECK(err_code);
err_code = nrf_drv_saadc_channel_init(BAT_CHANNEL, &ch_config_bat);
APP_ERROR_CHECK(err_code);
err_code = nrfx_saadc_buffer_convert(m_buffer_pool[0], SAMPLES_IN_BUFFER);
APP_ERROR_CHECK(err_code);
err_code = nrfx_saadc_buffer_convert(m_buffer_pool[1], SAMPLES_IN_BUFFER);
APP_ERROR_CHECK(err_code);
}
static void repeated_timer_handler(void * p_context)
{
NRF_LOG_INFO("saadc start\n");
nrf_gpio_pin_set(NRF_POWER_EN);
nrf_saadc_enable();
nrf_saadc_task_trigger(NRF_SAADC_TASK_START);
nrf_drv_timer_enable(&m_timer);
nrf_drv_ppi_channel_enable(m_ppi_channel);
}
static void psm_timer_handler(void * p_context)
{
NRF_LOG_INFO("saadc(psm) start\n");
nrf_gpio_pin_set(NRF_POWER_EN);
nrf_saadc_enable();
nrf_saadc_task_trigger(NRF_SAADC_TASK_START);
nrf_drv_timer_enable(&m_timer);
nrf_drv_ppi_channel_enable(m_ppi_channel);
}
static void create_timers()
{
ret_code_t err_code;
err_code = app_timer_create(&m_repeated_timer_id,
APP_TIMER_MODE_REPEATED,
repeated_timer_handler);
APP_ERROR_CHECK(err_code);
err_code = app_timer_create(&m_psm_timer_id,
APP_TIMER_MODE_REPEATED,
psm_timer_handler);
APP_ERROR_CHECK(err_code);
}
static void start_repeated_timer()
{
ret_code_t err_code;
err_code = app_timer_start(m_repeated_timer_id, APP_TIMER_TICKS(20000), NULL); //3600000
APP_ERROR_CHECK(err_code);
}
static void start_psm_timer()
{
ret_code_t err_code;
err_code = app_timer_start(m_psm_timer_id, APP_TIMER_TICKS(20000), NULL); //3600000
APP_ERROR_CHECK(err_code);
}
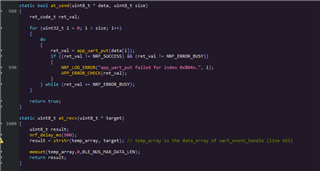
static bool at_send(uint8_t * data, uint8_t size)
{
ret_code_t ret_val;
for (uint32_t i = 0; i < size; i++)
{
do
{
ret_val = app_uart_put(data[i]);
if ((ret_val != NRF_SUCCESS) && (ret_val != NRF_ERROR_BUSY))
{
NRF_LOG_ERROR("app_uart_put failed for index 0x%04x.", i);
APP_ERROR_CHECK(ret_val);
}
} while (ret_val == NRF_ERROR_BUSY);
}
return true;
}
static uint8_t at_recv(uint8_t * target)
{
uint8_t result;
nrf_delay_ms(500);
result = strstr(temp_array, target); // temp_array is the data_array of uart_event_handle (line 425)
memset(temp_array,0,BLE_NUS_MAX_DATA_LEN);
return result;
}
//static bool check_response(uint8_t * tx_msg, uint8_t size, uint8_t * rx_msg)
//{
// bool done = false;
// start = DWT->CYCCNT;
// if(at_send(tx_msg, size) && at_recv("OK"))
// {
// do
// {
// done = at_recv(rx_msg);
// stop=DWT->CYCCNT;
// elapsed=stop-start;
// NRF_LOG_INFO("%d", elapsed);
// } while ((!done) && elapsed < 1161463338);
// }
//
// return done;
//}
//
//static void open_mqtt(void)
//{
// uint8_t msg[] = "AT+QMTOPEN=0,\"avq1xsl5cm8b-ats.iot.us-west-2.amazonaws.com\",8883\r";
// if(!(check_response(msg, sizeof(msg),"0,0")))
// {
// NRF_LOG_INFO("Failed\n");
// }
//
//}
static void lte_reboot(void)
{
uint8_t msg[] = "AT+CFUN=1,1\r";
at_send(msg, sizeof(msg));
app_uart_close();
uart_init();
}
static void open_mqtt(void)
{
bool done = false;
uint8_t msg[] = "AT+QMTOPEN=0,\"avq1xsl5cm8b-ats.iot.us-west-2.amazonaws.com\",8883\r";
start = DWT->CYCCNT;
if(at_send(msg, sizeof(msg)) && at_recv("OK"))
{
do
{
done = at_recv("0,0");
stop=DWT->CYCCNT;
elapsed=stop-start;
} while ((!done) && elapsed < 2061463338);
}
if (!done)
{
// NRF_LOG_INFO("Open Failed\n");
}
}
static void connect_mqtt(void)
{
bool done = false;
uint8_t msg[] = "AT+QMTCONN=0,\"mqtttest\"\r";
start = DWT->CYCCNT;
if(at_send(msg, sizeof(msg)) && at_recv("OK"))
{
do
{
done = at_recv("0,0,0");
stop=DWT->CYCCNT;
elapsed=stop-start;
} while ((!done) && elapsed < 3061463338);
// NRF_LOG_INFO("enter\n");
}
if (!done)
{
// NRF_LOG_INFO("Connect Failed\n");
}
}
void close_mqtt(void)
{
bool done = false;
uint8_t msg[] = "AT+QMTDISC=0\r";
start = DWT->CYCCNT;
if(at_send(msg, sizeof(msg)) && at_recv("OK"))
{
do
{
done = at_recv("0,0");
stop=DWT->CYCCNT;
elapsed=stop-start;
} while ((!done) && elapsed < 1161463338);
}
if (!done)
{
// NRF_LOG_INFO("Failed\n");
}
}
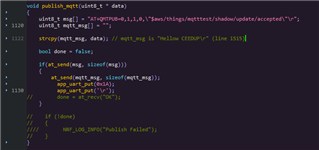
void publish_mqtt(uint8_t * data)
{
uint8_t msg[] = "AT+QMTPUB=0,1,1,0,\"$aws/things/mqtttest/shadow/update/accepted\"\r";
uint8_t mqtt_msg[] = "";
strcpy(mqtt_msg, data); // mqtt_msg is "Hellow CEEDUP\r" (line 1515)
bool done = false;
if(at_send(msg, sizeof(msg)))
{
at_send(mqtt_msg, sizeof(mqtt_msg));
app_uart_put(0x1A);
app_uart_put('\r');
// done = at_recv("OK");
}
// if (!done)
// {
//// NRF_LOG_INFO("Publish Failed");
// }
}
void subscribe_mqtt(void)
{
bool done = false;
uint8_t msg[] = "AT+QMTSUB=0,1,\"$aws/things/mqtttest/shadow/update/accepted\",1\r";
if(at_send(msg, sizeof(msg)) && at_recv("OK"))
{
do
{
done = at_recv("0,1,0,1");
} while (!done);
}
}
void lte_psm_enable(void)
{
lte_lock = false;
uint8_t cpsms_down[] = "AT+CPSMS=1,,,\"00000100\",\"00001111\"\r";
at_send(cpsms_down, sizeof(cpsms_down));
at_recv("OK");
app_uart_close();
}
void lte_psm_disable(void)
{
lte_lock = true;
uint8_t cpsms_up[] = "AT+CPSMS=0";
// uart_init();
close_mqtt();
at_send(cpsms_up, sizeof(cpsms_up));
at_recv("OK");
}
void lte_check(void)
{
bool done = false;
uint8_t qcds[] = "AT+QCDS\r";
start = DWT->CYCCNT;
do
{
at_send(qcds, sizeof(qcds));
done = at_recv("SRV");
stop=DWT->CYCCNT;
elapsed=stop-start;
nrf_delay_ms(1000);
} while ((!done) && elapsed < 1161463338);
if (!done)
{
NRF_LOG_INFO("Failed\n");
lte_reboot();
}
}
void lte_setup()
{
uint8_t SSL[] = "AT+QMTCFG=\"SSL\",0,1,2\r";
uint8_t version[] = "AT+QMTCFG=\"version\",0,4\r";
uint8_t cacert[] = "AT+QSSLCFG=\"cacert\",2,\"UFS:root.pem\"\r";
uint8_t clientcert[] = "AT+QSSLCFG=\"clientcert\",2,\"UFS:cert.pem\"\r";
uint8_t clientkey[] = "AT+QSSLCFG=\"clientkey\",2,\"UFS:key.pem\"\r";
uint8_t seclevel[] = "AT+QSSLCFG=\"seclevel\",2,2\r";
uint8_t sslversion[] = "AT+QSSLCFG=\"sslversion\",2,4\r";
uint8_t ciphersuite[] = "AT+QSSLCFG=\"ciphersuite\",2,0xffff\r";
uint8_t ignorelocaltime[] = "AT+QSSLCFG=\"ignorelocaltime\",1\r";
uint8_t aws_open[] = "AT+QMTOPEN=0,\"avq1xsl5cm8b-ats.iot.us-west-2.amazonaws.com\",8883\r";
uint8_t aws_conn[] = "AT+QMTCONN=0,\"mqtttest\"\r";
at_send(SSL, sizeof(SSL));
at_recv("OK");
nrf_delay_ms(1000);
at_send(version, sizeof(version));
at_recv("OK");
nrf_delay_ms(1000);
at_send(cacert, sizeof(cacert));
at_recv("OK");
nrf_delay_ms(1000);
at_send(clientcert, sizeof(clientcert));
at_recv("OK");
nrf_delay_ms(1000);
at_send(clientkey, sizeof(clientkey));
at_recv("OK");
nrf_delay_ms(1000);
at_send(seclevel, sizeof(seclevel));
at_recv("OK");
nrf_delay_ms(1000);
at_send(sslversion, sizeof(sslversion));
at_recv("OK");
nrf_delay_ms(1000);
at_send(ciphersuite, sizeof(ciphersuite));
at_recv("OK");
nrf_delay_ms(1000);
at_send(ignorelocaltime, sizeof(ignorelocaltime));
at_recv("OK");
nrf_delay_ms(1000);
open_mqtt();
nrf_delay_ms(1000);
connect_mqtt();
}
//test is needed.
void pwr_mgmt(int16_t bat_level)
{
NRF_LOG_INFO("bat_level : %d\n", bat_level);
if(!pwr_saving_mode)
{
if(bat_level < BAT_LIMIT)
{
pwr_saving_mode = true;
arducam_stop = true;
cam_working = true;
// nrf_gpio_pin_clear(NRF_POWER_EN);
app_timer_stop(m_repeated_timer_id);
start_psm_timer();
// while(lte_lock);
// lte_psm_disable();
// lte_check();
// lte_setup();
// publish_mqtt("bat down\r");
// lte_psm_enable();
flash_on = true;
flash_evt_handler(2);
NRF_LOG_INFO("pwr_saving mode and %d\n", nrf_gpio_pin_out_read(NRF_POWER_EN));
}
else if(bat_level < BAT_LIMIT +5UL)
{
arducam_stop = true;
}
}
else
{
if(bat_level >= BAT_LIMIT +5UL)
{
arducam_stop = false;
cam_working = false;
pwr_saving_mode = false;
// nrf_gpio_pin_set(NRF_POWER_EN);
app_timer_stop(m_psm_timer_id);
start_repeated_timer();
// while(lte_lock);
// lte_psm_disable();
// lte_check();
// lte_setup();
// publish_mqtt("bat up\r");
// lte_psm_enable();
flash_on = true;
flash_evt_handler(2);
NRF_LOG_INFO("not pwr_saving mode and %d\n", nrf_gpio_pin_out_read(NRF_POWER_EN));
}
}
}
static void camera_init(void)
{
#if defined(BOARD_PCA10056)
#if(PCA10056_USE_FRONT_HEADER == 1)
m_camera_init.pinScl = 13;
m_camera_init.pinSda = 15;
m_camera_init.pinSck = 21;
m_camera_init.pinMiso = 23;
m_camera_init.pinMosi = 25;
m_camera_init.pinCsn = 32 + 9;
#else
m_camera_init.pinScl = 27;
m_camera_init.pinSda = 26;
m_camera_init.pinSck = 32 + 15;
m_camera_init.pinMiso = 32 + 14;
m_camera_init.pinMosi = 32 + 13;
m_camera_init.pinCsn = 32 + 12;
#endif
#elif defined(BOARD_PCA10040)
m_camera_init.pinScl = 27;
m_camera_init.pinSda = 26;
m_camera_init.pinSck = 25;
m_camera_init.pinMiso = 24;
m_camera_init.pinMosi = 23;
m_camera_init.pinCsn = 22;
#else
#error Board not defined or not supported
#endif
arducam_mini_2mp_open(&m_camera_init);
arducam_mini_2mp_setResolution(OV2640_1024x768);
// arducam_set_bit(ARDUCHIP_TIM, LOW_POWER_MODE);
arducam_wrSensorReg8_8(0xff, 0x01); //NIGHT MODE
arducam_wrSensorReg8_8(0x11, 0x07);
// arducam_wrSensorReg8_8(0xff, 0x00); //Saturation level 2
// arducam_wrSensorReg8_8(0x7c, 0x00);
// arducam_wrSensorReg8_8(0x7d, 0x02);
// arducam_wrSensorReg8_8(0x7c, 0x03);
// arducam_wrSensorReg8_8(0x7d, 0x58);
// arducam_wrSensorReg8_8(0x7d, 0x58);
nrf_delay_ms(2000);
}
void camera_function(void)
{
if(!cam_working)
{
flash_evt_handler(1);
for(int i=0; i<10; i++)
{
uint32_t img_data_length = 0;
uint8_t img_data_buffer[255];
uint8_t count = 0;
uint32_t image_size;
static uint8_t capture_count;
cam_working = true;
if(!arducam_stop)
{
if(m_new_command_received != APP_CMD_SINGLE_CAPTURE)
{
m_new_command_received = APP_CMD_SINGLE_CAPTURE;
}
if(m_new_command_received != APP_CMD_NOCOMMAND)
{
uint32_t new_command = m_new_command_received;
m_new_command_received = APP_CMD_NOCOMMAND;
switch(new_command)
{
case APP_CMD_SINGLE_CAPTURE:
if(arducam_mini_2mp_bytesAvailable() == 0)
{
capture_count++;
printf("\n\rStarting capture %i\n\r",capture_count);
arducam_mini_2mp_startSingleCapture(); // capture function
image_size = arducam_mini_2mp_bytesAvailable();
// flash_on = false; // after taking picture, no needs to keep turning on flash
printf("\n\rCapture complete: size %i bytes\n\r", (int)(image_size));
}
break;
// case APP_CMD_CHANGE_RESOLUTION:
// switch(m_new_resolution)
// {
// case 0:
// arducam_mini_2mp_setResolution(OV2640_160x120);
//// lte_send("resolution is changed to 160x120");
// break;
//
// case 1:
// arducam_mini_2mp_setResolution(OV2640_320x240);
//// lte_send("resolution is changed to 320x240");
// break;
//
// case 2:
// arducam_mini_2mp_setResolution(OV2640_640x480);
//// lte_send("resolution is changed to 640x480");
// break;
//
// case 3:
// arducam_mini_2mp_setResolution(OV2640_800x600);
//// lte_send("resolution is changed to 800x600");
// break;
//
// case 4:
// arducam_mini_2mp_setResolution(OV2640_1024x768);
//// lte_send("resolution is changed to 1024x768");
// break;
//
// case 5:
// arducam_mini_2mp_setResolution(OV2640_1600x1200);
//// lte_send("resolution is changed to 1600x1200");
// break;
// }
// break;
default:
break;
}
}
}
if(img_data_length > 0 || arducam_mini_2mp_bytesAvailable() > 0)
{
uint32_t ret_code;
do
{
if(img_data_length == 0)
{
img_data_length = arducam_mini_2mp_fillBuffer(img_data_buffer, 244);
}
ret_code = NRF_SUCCESS;
if(0 < img_data_length)
{
// printf("\n\r%i)) %s ((%i", count, img_data_buffer, img_data_length);
// nrf_delay_ms(10);
// printf("\n");
}
else
{
ret_code = NRF_ERROR_RESOURCES;
}
if(ret_code == NRF_SUCCESS)
{
count++;
img_data_length = 0;
}
}while(ret_code == NRF_SUCCESS);
count = 0;
cam_working = false;
}
if(m_new_command_received == APP_CMD_NOCOMMAND)
{
idle_state_handle();
}
}
}
else
{
printf("cam is working\n");
}
flash_on = true;
flash_evt_handler(2);
}
//#ifdef TIMECHECK
//void time_check(void)
//{
// if(counter == 1023)
// {
// stop=DWT->CYCCNT;
// elapsed=stop-start;
// printf("%d\n", elapsed);
// counter = 0;
// start = DWT->CYCCNT;
// }
// counter++;
//}
//#endif
int main(void)
{
int cnt = 0;
CoreDebug->DEMCR |= 0x1000000;
DWT->CYCCNT = 0;
DWT->CTRL |= 0x1;
// Initialize.
board_init();
log_init();
timer_init();
uart_init();
// leds_init();
power_management_init();
ble_stack_init();
sd_power_dcdc_mode_set(NRF_POWER_DCDC_ENABLE);
gatt_init();
db_discovery_init();
// saadc_init();
// saadc_sampling_event_init();
nus_c_init();
ble_conn_state_init();
scan_init();
nrf_delay_ms(2000);
lte_check();
lte_setup();
nrf_delay_ms(5000);
publish_mqtt("Hellow CEEDUP\r");
// lte_psm_enable();
// app_uart_close();
// Start execution.
NRF_LOG_INFO("Multilink example started.");
scan_start();
// create_timers();
// start_repeated_timer();
// camera_init();
// saadc_sampling_event_enable();
// cycle counter setup
// #ifdef TIMECHECK
// CoreDebug->DEMCR |= 0x1000000;
// DWT->CYCCNT = 0;
// DWT->CTRL |= 0x1;
// #endif
for (;;)
{
idle_state_handle();
}
}
and below figures are the function which I used to publish the message.
and as you can see, the log data is printed abnormally.

Same message is printed partially and multiple times. Also, I can't see '<' which is the response of the mqtt publish AT command.
Q1. I used app_uart_put(0x1A) to send hex character. Is it right way?
Q2. How can I print the log normally?
Best regards,
Baek
