
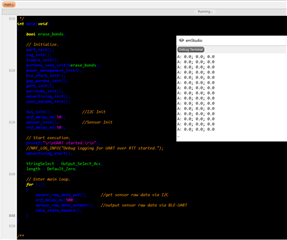
values returned by ACC is always 0 !!
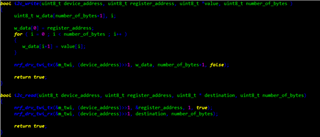
i2c_write && i2c_read
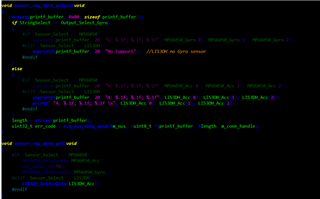
le_nus_data_send via uart && printf( "A: %.1f; %.1f; %.1f \n", LIS3DH_Acc[0], LIS3DH_Acc[1], LIS3DH_Acc[2]);
shema hardware LIS3DH :
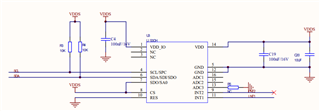
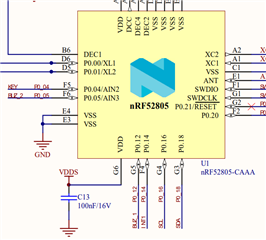
shema hardware NRF52805 && LIS3DH :
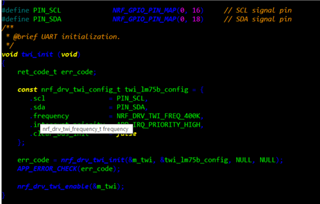
twi initi:
#define PIN_SCL NRF_GPIO_PIN_MAP(0, 16) // SCL signal pin
#define PIN_SDA NRF_GPIO_PIN_MAP(0, 18) // SDA signal pin
void LIS3DH_Init(void)
{
uint8_t chipid = 0;
uint8_t tmp = 0;
for(int i=0; i<30000; i++){__ASM("nop");}
//read chip id
for (int i = 0; i < 10 ; i++ )
{
for(int j = 0 ; j < 1000 ; j++ ) {__asm("NOP");}
i2c_read(LIS3DH_I2C_ADDRESS ,LIS3DH_REGISTER_WHO_AM_I, &chipid, 0x01);
//printf("LIS3DH_REGISTER_WHO_AM_I %d",LIS3DH_REGISTER_WHO_AM_I);
if ( chipid == 0x33 ) {
break;
}
}
//reboot sensor
tmp = (LIS3DH_CTRL_REG5_REBOOT);
i2c_write(LIS3DH_I2C_ADDRESS ,LIS3DH_REGISTER_CTRL_REG5, &tmp, 0x01);
//delay some time
for(int i=0; i<30000; i++){__ASM("nop");}
for(int i=0; i<30000; i++){__ASM("nop");}
for(int i=0; i<30000; i++){__ASM("nop");}
for(int i=0; i<30000; i++){__ASM("nop");}
for(int i=0; i<30000; i++){__ASM("nop");}
//report rate = 200Hz, x/y/z axis enable
tmp = (LIS3DH_CTRL_REG1_DATARATE_200HZ | LIS3DH_CTRL_REG1_XYZEN);
i2c_write(LIS3DH_I2C_ADDRESS ,LIS3DH_REGISTER_CTRL_REG1, &tmp, 0x01);
//delay some time
for(int i=0; i<30000; i++){__ASM("nop");}
for(int i=0; i<30000; i++){__ASM("nop");}
for(int i=0; i<30000; i++){__ASM("nop");}
for(int i=0; i<30000; i++){__ASM("nop");}
//enable block data update, full-scale = +-8g
tmp = (LIS3DH_CTRL_REG4_BLOCKDATAUPDATE | LIS3DH_CTRL_REG4_SCALE_8G);
i2c_write(LIS3DH_I2C_ADDRESS ,LIS3DH_REGISTER_CTRL_REG4, &tmp, 0x01);
}
void LIS3DH_GetAccData(float *acc)
{
uint8_t tmp[6] = {0};
int16_t tmp_int16[3] = {0};
uint8_t status = 0;
//check data ready?
i2c_read(LIS3DH_I2C_ADDRESS ,(LIS3DH_REGISTER_STATUS_REG2), &status, 0x01);
if(status & LIS3DH_STATUS_REG_ZYXDA)
{
i2c_read(LIS3DH_I2C_ADDRESS ,(LIS3DH_REGISTER_OUT_X_L | LIS3DH_READ_MULTI_BYTES), tmp, 0x06);
tmp_int16[0] = (int16_t)((tmp[1]<< 8) | tmp[0]);
tmp_int16[1] = (int16_t)((tmp[3]<< 8) | tmp[2]);
tmp_int16[2] = (int16_t)((tmp[5]<< 8) | tmp[4]);
acc[0] = (float)(tmp_int16[0]) * LIS3DH_ACC_CONVERT_8G;
acc[1] = (float)(tmp_int16[1]) * LIS3DH_ACC_CONVERT_8G;
acc[2] = (float)(tmp_int16[2]) * LIS3DH_ACC_CONVERT_8G;
}
}
-NRF52805 pca10040e
-SDK 15.00
-ble app uart
-s112_nrf52_6.0.0_softdevice.hex
I moved the device but the values still remain x =0.0 y=0.0 z=0.0!!
Please help me to fix this. Also, If you think any other approach is simple and efficient, please let me know. Im open to suggestions.

