SDK Environment: nRF Connect SDK v1.7.1
Target: Decawave DWM1001-DEV. This uses the nRF52832
A 5 byte SPI transfer is taking about 17us when using the nordic spim drivers and about 56us when using the zephyr spim drivers.
SPI CLK frequency = 8M
Would this be considered normal? The slow speed of the zephyr SPI drivers is causing problems in my application.
The zephyr drivers seem to be stable, but slow.
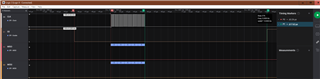
I set and clear a gpio testpin before and after the SPI transfer so I can measure the timing.
SPI timing with the nordic drivers

SPI timing with the zephyr drivers

"nrfx_spim.zip" uses the nordic drivers
"zephyr_spim.zip" uses the zephyr drivers