Hello community,
I'm trying to implement BT service on my project to be able to connect with my phone
for information my project displays data from sensors(BME280, INA219, MPU6050) connected to my D-kit
i'm using nrf connect V1.8.0 and NRF5340dk
i got inspired from this BT tutorial to create my services
but in terms of BT connexion i don't get the device on my ophone when i scan devices around
which means that connexion isn't established
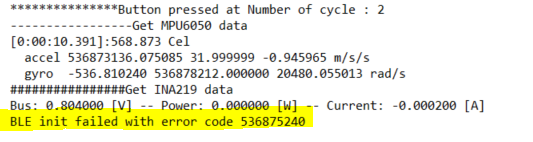
and i got this message "Advertising failed to start (err-11)"
i will attach below my output display 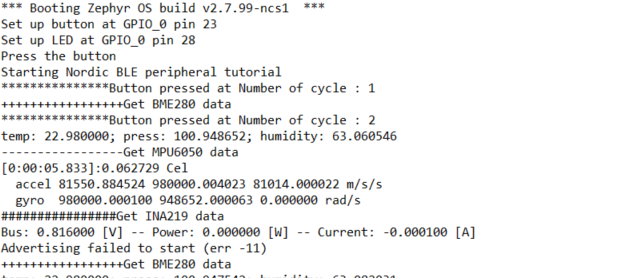
i tried to flash my D-kit directly but it didn't work
and i tried to activate the BT but in vain too
i tried to use this function
//Start advertising err = bt_le_adv_start(BT_LE_ADV_PARAM( BT_LE_ADV_OPT_CONNECTABLE |BT_LE_ADV_OPT_ONE_TIME |BT_LE_ADV_OPT_USE_NAME, 160, // units of 0.625ms 1600), // units of 0.625ms ad, ARRAY_SIZE(ad), sd, ARRAY_SIZE(sd));
Can you guys help by telling me what's wrong on this situation
why can't i get the bt to advertise
do i missing something on the main or on the activation
by the way my prj.conf should be good and i will liked below
CONFIG_BT=y CONFIG_BT_DEBUG_LOG=y CONFIG_BT_MAX_CONN=1 CONFIG_BT_L2CAP_TX_BUF_COUNT=5 CONFIG_BT_PERIPHERAL=y CONFIG_BT_DEVICE_NAME="My_Device" CONFIG_BT_DEVICE_APPEARANCE=962 CONFIG_HEAP_MEM_POOL_SIZE=2048 # This example requires more workqueue stack CONFIG_SYSTEM_WORKQUEUE_STACK_SIZE=2048 CONFIG_STDOUT_CONSOLE=y CONFIG_CBPRINTF_FP_SUPPORT=y CONFIG_SENSOR=y CONFIG_I2C=y CONFIG_LOG_MODE_IMMEDIATE=y CONFIG_UART_CONSOLE=n CONFIG_RTT_CONSOLE=y CONFIG_USE_SEGGER_RTT=y CONFIG_PRINTK=y CONFIG_INA219=y CONFIG_BME280=y CONFIG_SHELL_BACKEND_SERIAL=y
Can you help me with this please
i will be very grateful