

Recently, we've updated the SEGGER Embedded Studio Nordic edition (SES) to version 4.16 (SES Nordic Edition is special version of SES built specifically for nRF Connect SDK).
This updated version introduced some new features to support building of the latest versions of nRF Connect SDK, and some general UI improvements. We also updated the nRF Connect for Desktop Getting Started Assistant to version 0.9.0.
Some of the key things that changed in SES and in the nRF Connect SDK impacts the getting started path, and other how to open up the first project. We will update the Getting Started Assistant shortly, but in the meantime here are some pointers on how to work with the latest version of both SES and the master branch of nRF Connect SDK. If you are using the 0.3.0 tagged version of nRF Connect SDK then the paths are as described in the current Getting Started Assistant 0.9.0.
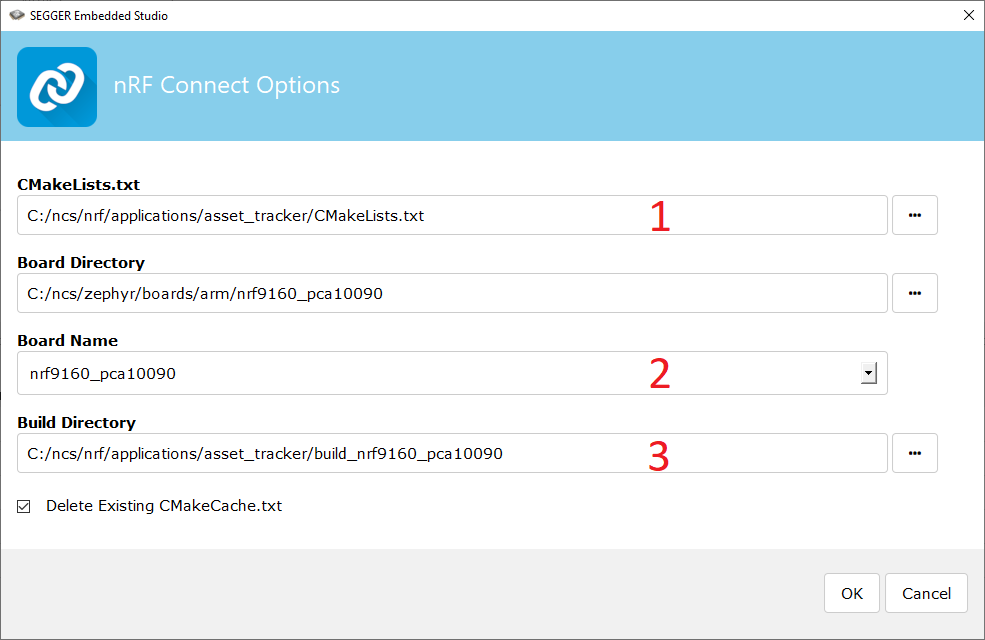
Above is the import nRF Connect SDK sample dialog box for SES Nordic Edition version 4.16. The first thing (marked 1 in the picture) has changed is the path to Asset Tracker example. This used to be under ncs/nrf/samples but has been moved to ncs/application/samples. Smaller examples will be found in the samples folder while more complete applications will be found in the applications folder.
The second thing that has changed is a new Board Name field added to the dialog box (#2). This has been added to support building both secure and non-secure applications in nRF Connect SDK. The secure memory area of the nRF9160 has the same name as before (in this case nrd9160_PCA10090). This area is used by the MCU boot application and the SPM application. Using this board name will put the generated code in the memory area allocated to secure applications. If you are building the asset tracker application then this should reside in the non-secure memory area of the nRF9160. To build for this area you should select the nrf9160_pca100090ns device. If you try to build the asset tracker application for the secure memory region it will not work.
Next, the build directory will now automatically be suggested during the import (#3). You can easily override this by selecting the directory directly in dialog box.
There are 2 items have been removed from the import dialog, you can see these in the two images below, comparing SES v4.12 and SES v4.16:
SES v4.12:
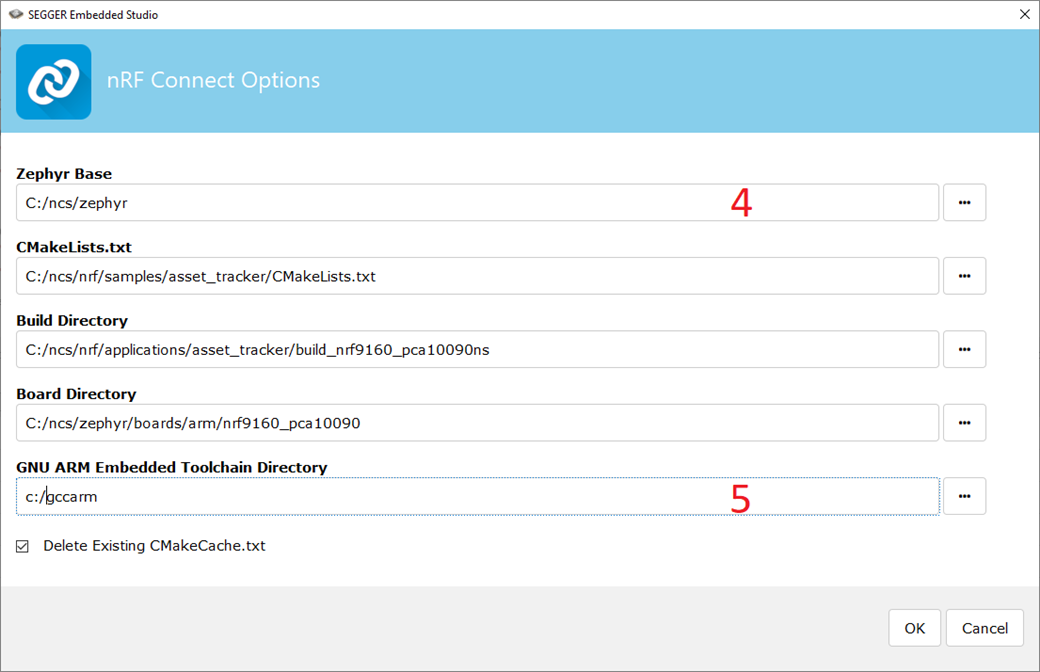
SES v4.16:
The Zephyr base setting has been removed from the import dialog (#4) as it is usually a static value and not subject to change when swapping between projects. If you have not used SES Nordic Edition in the past then you will get asked to select this when doing the first project import.
The toolchain directory input has also been removed from the import dialog (#5). Same reason here, it is not a value that is expected to change when swapping between projects.
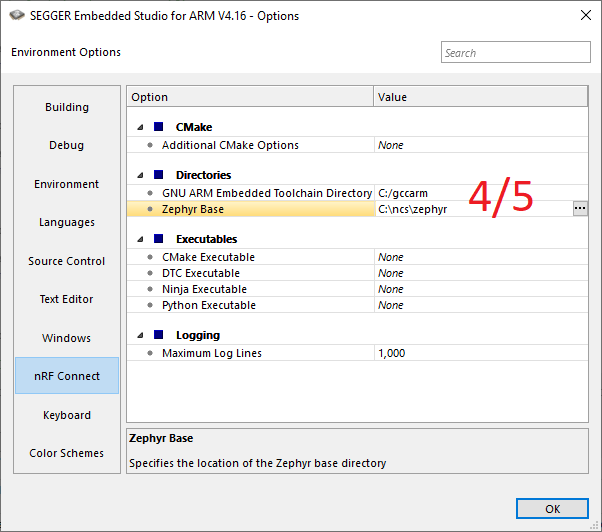
Both the Zephyr base directory and the GCC toolchain directory setting will be kept from the last use. If you have used the older version on SES Nordic Edition then these values will be stored already in the environment variables of SES. If you want to change these then the settings are stored under tools -> options -> NRF Connect, see the third picture below. In this menu you can also override the paths to Cmake, DTC, Ninja and python.
We have seen some issues on windows with getting the path correct, python 2 selected instead of python 3, this can be fixed by adding the python 3 path in this menu.



