
Hi all,
I measured the delays between a GPIOTE event and a Task (in this case toggling with another GPIOTE) through PPI.

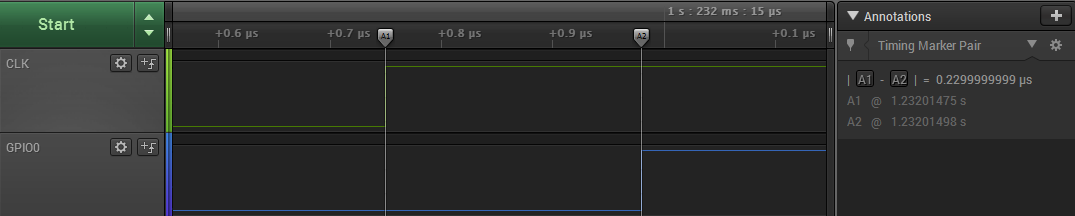
The results are showed below:

For the nRF52 it's arround 380ns.
The same measurements were done with the nRF51.
Here it's arround 250ns.
Originally i am coming from counting the pulses of a high frequency signal ~3.5MHz which works fine on the nRF51 but doesn't work on the nRF52.
I couldn't find any information about this topic. So i was wondering:
- where that difference is coming from
- if these delays are accurate and valid for other tasks too
- what happens if too many pulses appear?
On the nRF52 the output pulses look as followed:

It looks like the chip can only handle some but not all of them which leads to weird on-off times.
With the nRF51 it looks like that:

All of the input pulses are processed and generate the expected output.
I hope you can help me and that there is a possibility to get the same results on the nRF52 without adding a flip flop to divide the HF-signal by two.


