
Hi I am presently working on MPU92/65 sensor interfacing with TWI/I2C.
i am using nRF51822 EK with soft device s130_nRF51_2.0.0(id:0x0080) and nRF5 SDK v11.0.0 and keil u vision5.
I was taken nrf5-ble-mpu-simple programme (C:SDK_11.0.0\examples\nrf5-mpu-examples-master\nrf5-ble-mpu-simple\pca10028\s130\arm5_no_packs\twi).
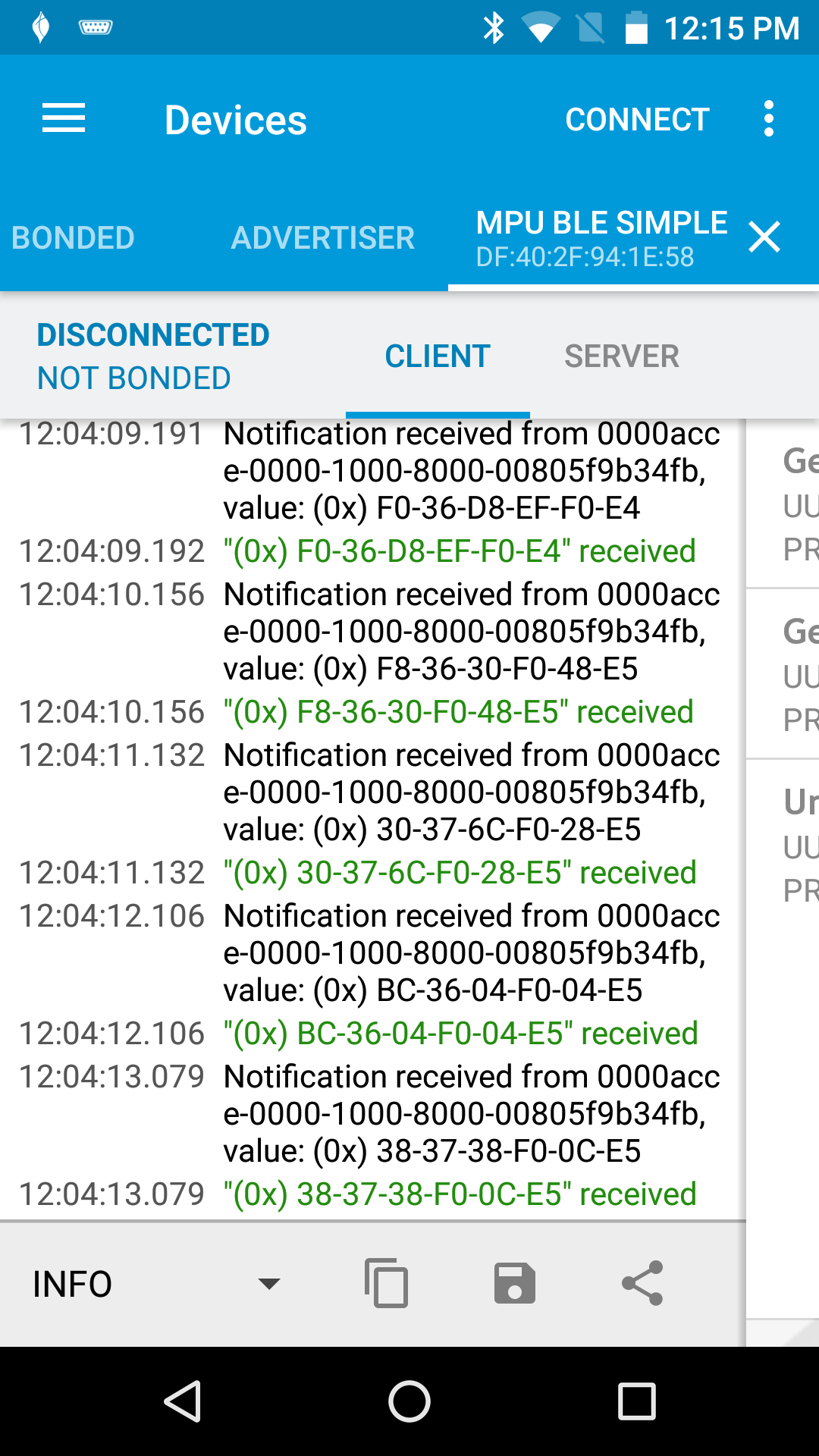
I am using nRF connect to read the values. Screenshot_20170206-121526.png But from this code we are getting values in HEX format. how to convert them to decimal.one more thing I think we are getting only accelerometer sensor values.how to get the remaining sensor values
I am attaching the screen short of output.
Please help me to convert HEX format values in to decimal and to read Gyro and Magneto sensor values.


{kind=link}