
I have an application where I need to synchronize several devices to within 1us using a radio. In order to do this, we need to make a protocol that allows precise synchronization. We are already using a different vendor's 2.4GHz offering to do this, but would like to move to NRF51822 if possible.
Basic idea: master device transmits a packet using the transmit sequence described in the reference manual, without using the shortcut feature. Denote the time at which the master MCU issues the start command as t0.
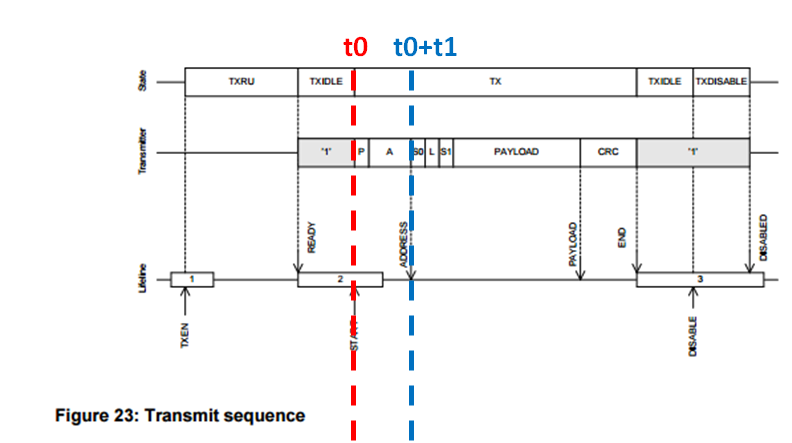
Receiver device is assumed to be already on and listening for a valid packet. The receiver receives the preamble and the address and the address match causes an event on the receiver's MCU. Denote the time at which the receiver's MCU receives the address interrupt as t0+t1.
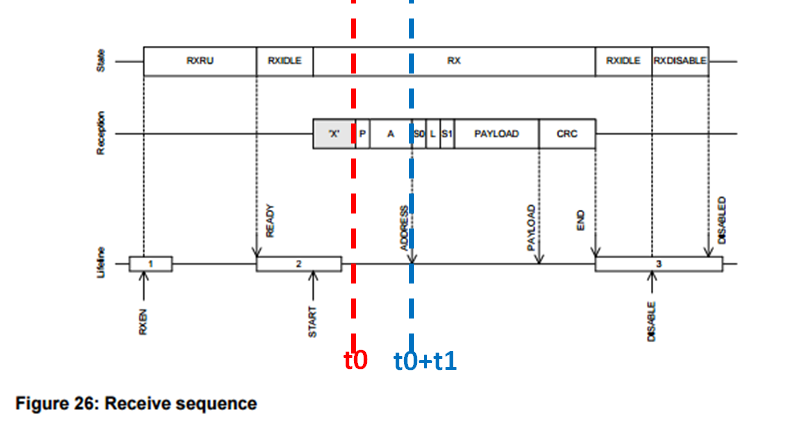
My question is about the jitter on the time t1, the time between when the event is triggered by the master's MCU and when the address match event is triggered on the receiver's MCU.
I understand that there will be some fixed delay due to the time required to transmit the preamble and the address, but my question is about the random amount of delay in t1 due to e.g. synchronizers on either the TX chain or the RX chain. The total variance in t1 should be the sum of the variances of the START->on air radio TX process and the address reception->ADDRESS process. If anyone can help me get an estimate of what those variances might be, I'd appreciate it.

