
Hi..! I am trying to ***Receive ACCELEROMETER DATA FROM MPU6050 to PCA10028(NRF51822) AND WANTING TO PRINT IT ONTO UART using KEIL IDE. Code is getting compiled & getting Output on UART as:-
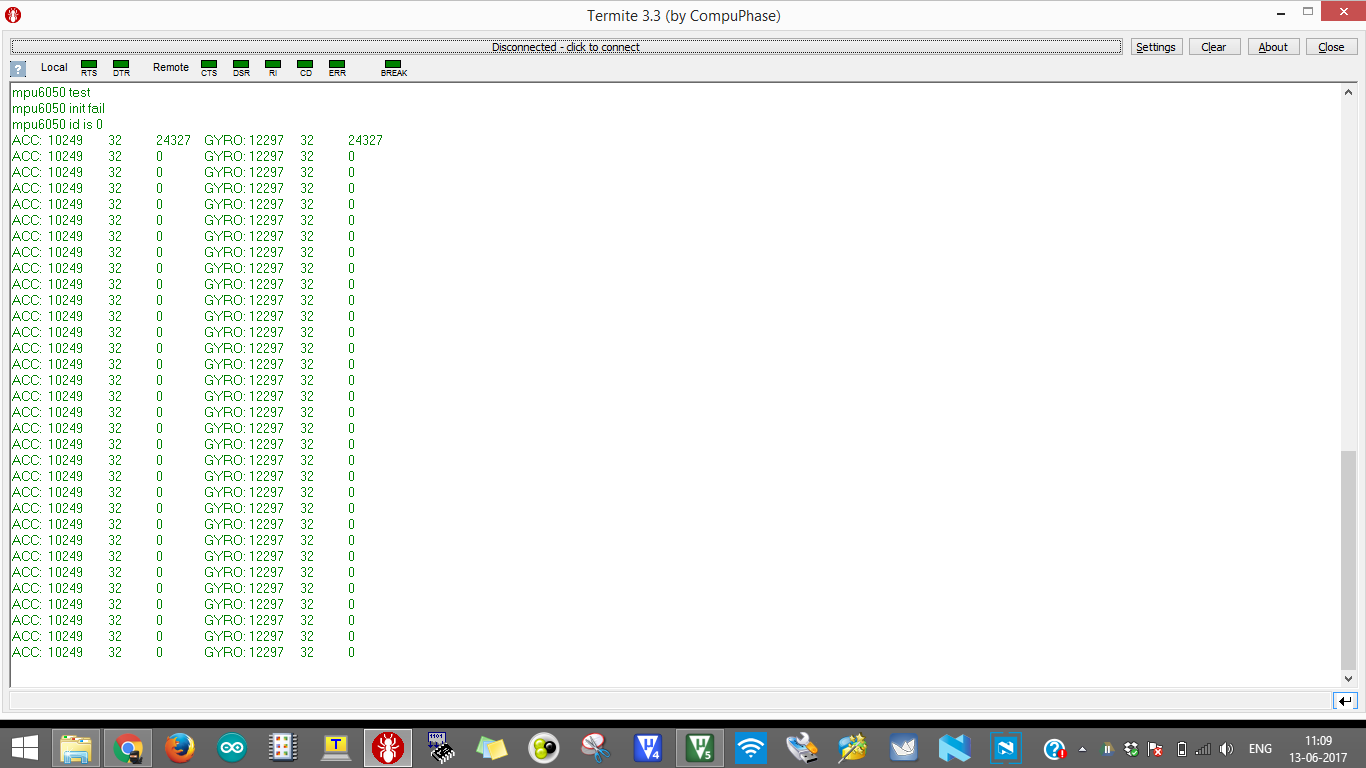
mpu6050 test
mpu6050 init fail
mpu6050 id is 0
ACC: 10249 32 24327 GYRO: 12297 32 24327 ACC: 10249 32 0 GYRO: 12297 32 0 ACC: 10249 32 0 GYRO: 12297 32 0 ACC: 10249 32 0 GYRO: 12297 32 0 ACC: 10249 32 0 GYRO: 12297 32 0 ACC: 10249 32 0 GYRO: 12297 32 0 ACC: 10249 32 0 GYRO: 12297 32 0 ACC: 10249 32 0 GYRO: 12297 32 0 problem are
- values are not changing on changing the orientation of MPU
- MPU initialization is failing Screenshot 2017-06-13 11.09.35.png .


{kind=link}