Hi!
I am getting a HardFault when I try to read a GATTs value inside a GPIOTE ISR handler.
I already tried setting the ISR priority to low as suggested in various posts.
Here is my code:
#include "app_settings.h"
#include "control.h"
#include "services.h"
#include "nrf_drv_gpiote.h"
#include "ble_srv_common.h"
#include "app_util_platform.h"
APP_TIMER_DEF(m_control_timer_id);
static void on_zx(nrf_drv_gpiote_pin_t pin, nrf_gpiote_polarity_t action){
UNUSED_PARAMETER(pin);
UNUSED_PARAMETER(action);
//nrf_drv_gpiote_in_event_disable(ZX_PIN);
ret_code_t err_code = 0;
// This ISR is called when a ZX interrupt occurs
// Start a timer in _level_ proportional ticks to allow dimming
// Disable Triac immediately
//nrf_drv_gpiote_out_set(TRIAC_PIN);
// Get level value from the GATT DB
ble_gatts_value_t gatts_value;
gatts_value.offset = 0;
err_code = sd_ble_gatts_value_get(m_ctl.conn_handle, m_ctl.ctl_level_handles.value_handle, &gatts_value);
APP_ERROR_CHECK(err_code);
float level = *((float*)gatts_value.p_value);
// Check level boundaries
if(level > 1){
level = 1;
}
if(level < 0){
level = 0.1;
}
//nrf_drv_gpiote_in_event_enable(ZX_PIN, true);
// Calculate wait time and start timer
// float T2 = 1.0 / 100;
// uint32_t wait_ms = (uint32_t)(T2 * (1 - level) * 1000);
// err_code = app_timer_start(m_control_timer_id, wait_ms, NULL);
// APP_ERROR_CHECK(err_code);
}
// static void on_timer(void * p_context){
// // Enable Triac
// nrf_drv_gpiote_out_clear(TRIAC_PIN);
// }
void init_ctl(void){
ret_code_t err_code;
// Init GPIOTE if not yet initialized
if(!nrf_drv_gpiote_is_init()){
err_code = nrf_drv_gpiote_init();
APP_ERROR_CHECK(err_code);
}
// Init timer for phase angle
//err_code = app_timer_create(&m_control_timer_id, APP_TIMER_MODE_SINGLE_SHOT, on_timer);
// Init pin for triac on
nrf_drv_gpiote_out_config_t out_config = GPIOTE_CONFIG_OUT_SIMPLE(false);
err_code = nrf_drv_gpiote_out_init(TRIAC_PIN, &out_config);
APP_ERROR_CHECK(err_code);
// Init pin for ZX ISR
nrf_drv_gpiote_in_config_t in_config = GPIOTE_CONFIG_IN_SENSE_LOTOHI(true);
in_config.pull = NRF_GPIO_PIN_PULLDOWN;
err_code = nrf_drv_gpiote_in_init(ZX_PIN, &in_config, on_zx);
APP_ERROR_CHECK(err_code);
// Lower IRQ prio so SD does not get fucked
NVIC_SetPriority(GPIOTE_IRQn, APP_IRQ_PRIORITY_LOW);
// Enable ISR on ZX rising edge
nrf_drv_gpiote_in_event_enable(ZX_PIN, true);
}
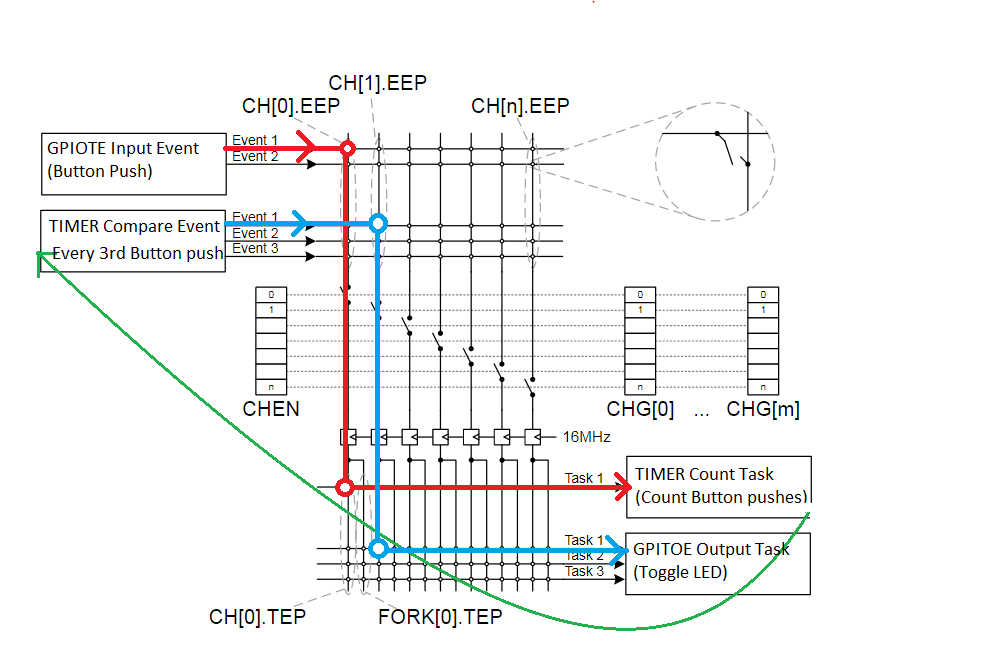
What I would like to do is having the ISR on a pin rising edge which starts a timer. The timer ISR should then set another pin to high. I am not quite sure how to make sure the priorities are set properly as apparently the priorities 0-5 are reserved for the SD. Also I do not like having to lower the priority for those said interrupts I want as they are timing critical. So using the app scheduler or the likes wont work either (as suggested in a few posts).
Thanks for any help in advance!
Best regards
Noah