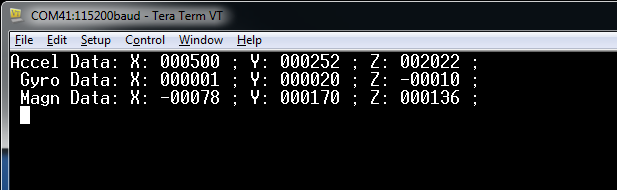
Hello, I am using nrf52840 PDK, sdk 13.0.0. I managed to read accel, gyro data from the MPU9250 using MPU library based on this example. However, I got magnetometer reading 0. I've checked this question and this question. Here is the code how I setup the MPU:
void mpu_setup(void)
{
printf("\r\nMPU setup start... \r\n");
ret_code_t ret_code;
// Initiate MPU driver
ret_code = mpu_init();
printf("\r\nMPU init complete! \r\n");
APP_ERROR_CHECK(ret_code); // Check for errors in return value
// Setup and configure the MPU with intial values
mpu_config_t p_mpu_config = MPU_DEFAULT_CONFIG(); // Load default values
p_mpu_config.smplrt_div = 19; // Change sampelrate. Sample Rate = Gyroscope Output Rate / (1 + SMPLRT_DIV). 19 gives a sample rate of 50Hz
p_mpu_config.accel_config.afs_sel = AFS_16G; // Set accelerometer full scale range
p_mpu_config.gyro_config.fs_sel = GFS_1000DPS; //Set gyroscope full scale range
ret_code = mpu_config(&p_mpu_config); // Configure the MPU with above values
APP_ERROR_CHECK(ret_code); // Check for errors in return value
}
void magn_setup()
{
ret_code_t ret_code;
//Enable bypass mode
mpu_int_pin_cfg_t bypass_config;
bypass_config.i2c_bypass_en = 1;
ret_code = mpu_int_cfg_pin(&bypass_config); // Set bypass mode
APP_ERROR_CHECK(ret_code); // Check for errors in return value
// Setup and configure the MPU Magnetometer
mpu_magn_config_t p_mpu_magn_config;
p_mpu_magn_config.resolution = OUTPUT_RESOLUTION_16bit; // Set output resolution
p_mpu_magn_config.mode = CONTINUOUS_MEASUREMENT_100Hz_MODE; //Set measurement mode
ret_code = mpu_magnetometer_init(&p_mpu_magn_config);
APP_ERROR_CHECK(ret_code); // Check for errors in return value
}
The full project can be found here. Need some help. Many thanks.
======================================================================
Update 22 Jan 2018:
Code added to magn_setup:
ret_code = nrf_drv_mpu_write_magnetometer_register(0x0A, 6); //writing to the control register
APP_ERROR_CHECK(ret_code);
uint8_t TempReading;
ret_code = nrf_drv_mpu_read_magnetometer_registers(0x00, &TempReading, 8);
APP_ERROR_CHECK(ret_code);
printf("Device ID: %d \n", TempReading);
ret_code = nrf_drv_mpu_read_magnetometer_registers(0x0A, &TempReading, 8);
APP_ERROR_CHECK(ret_code);
printf("Vaule read from control register: %d \n", TempReading);
Result observed by Termite:
Test1: MPU twi communication
MPU setup start...
MPU init complete!
MPU setup complete!
Device ID: 72
Vaule read from control register: 6
Accel Data: X: 000732 ; Y: -00111 ; Z: -02000 ;
Gyro Data: X: -00010 ; Y: 000030 ; Z: 000021 ;
Magn Data: X: 000000 ; Y: 000000 ; Z: 000000 ;