Hello Nordic developers,
I started my new journey with nRF9160 to expand my knowledge in embedded system. So, I got myself nRF9160-DK and started with the course until the I2C section,
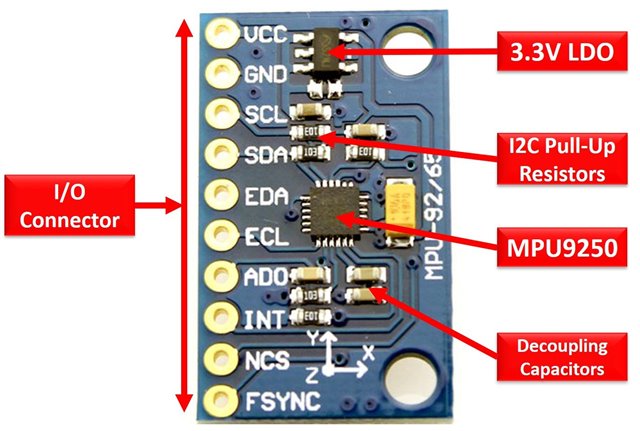
When I tried to modify the i2c section to be used with MPU9250 (since I didn't order X-Nucleo expansion board), The write function will always return error -5.
I've spent almost 2 weeks and still stuck.
Here are the steps I made:
I tired 0x68 alone without shifting -> Failed.
Shift to left and write -> Failed.
Changed the sensor to another -> Failed.
Here is my prj.conf:
# STEP 2 - Enable the I2C driver CONFIG_I2C=y # STEP 4.2 - Enable floating point format specifiers CONFIG_CBPRINTF_FP_SUPPORT=y
Overlay:
&i2c2 {
mysensor: mysensor@68{
compatible = "i2c-device";
status = "okay";
reg = < 0x68 >;
};
};
MPU9250.c :
#include <math.h>
#include "MPU9250.h"
#include <zephyr/kernel.h>
#include <zephyr/device.h>
#include <zephyr/devicetree.h>
/* STEP 3 - Include the header file of the I2C API */
#include <zephyr/drivers/i2c.h>
double accelRange,gyroRange;
uint8_t magBuf[7], magXAdjust, magYAdjust, magZAdjust;
char accelBuf[6],gyroBuf[6];
uint8_t magBuf[7];
int i;
int16_t magXOffset, magYOffset, magZOffset;
//start Accelerometer
#define I2C2_NODE DT_NODELABEL(mysensor)
static const struct i2c_dt_spec dev_i2c = I2C_DT_SPEC_GET(I2C2_NODE);
int8_t MPU9250_beginAccel(uint8_t mode) {
switch(mode) {
case ACC_FULL_SCALE_2_G:
accelRange = 2.0;
break;
case ACC_FULL_SCALE_4_G:
accelRange = 4.0;
break;
case ACC_FULL_SCALE_8_G:
accelRange = 8.0;
break;
case ACC_FULL_SCALE_16_G:
accelRange = 16.0;
break;
default:
return; // Return without writing invalid mode
}
if (!device_is_ready(dev_i2c.bus)){return 1;}
uint8_t data[2]={MPU9250_ADDR_ACCELCONFIG,mode};
return i2c_write_dt(&dev_i2c, data, 2);
}
//start gyroscope
int8_t MPU9250_beginGyro(uint8_t mode) {
switch (mode) {
case GYRO_FULL_SCALE_250_DPS:
gyroRange = 250.0;
break;
case GYRO_FULL_SCALE_500_DPS:
gyroRange = 500.0;
break;
case GYRO_FULL_SCALE_1000_DPS:
gyroRange = 1000.0;
break;
case GYRO_FULL_SCALE_2000_DPS:
gyroRange = 2000.0;
break;
default:
return; // Return without writing invalid mode
}
if (!device_is_ready(dev_i2c.bus)){return 1;}
uint8_t data[2]={27,mode};
return i2c_write_dt(&dev_i2c, data, 2);
}
int8_t MPU9250_accelUpdate(void) {
return i2c_write_read_dt(&dev_i2c, 0x3B,1,accelBuf,6);
}
float MPU9250_accelGet(uint8_t highIndex, uint8_t lowIndex) {
int16_t v = ((int16_t) accelBuf[highIndex]) << 8 | accelBuf[lowIndex];
return ((float) -v) * accelRange / (float) 0x8000; // (float) 0x8000 == 32768.0
}
float MPU9250_accelSqrt(void) {
return sqrt(pow(MPU9250_accelGet(0, 1), 2) +
pow(MPU9250_accelGet(2, 3), 2) +
pow(MPU9250_accelGet(4, 5), 2));
}
float MPU9250_accelX(void) {
return MPU9250_accelGet(0, 1);
}
float MPU9250_accelY(void) {
return MPU9250_accelGet(2, 3);
}
float MPU9250_accelZ(void) {
return MPU9250_accelGet(4, 5);
}
int8_t MPU9250_gyroUpdate(void) {
return i2c_write_read_dt(&dev_i2c, 0x43,1,gyroBuf,6);
}
float MPU9250_gyroGet(uint8_t highIndex, uint8_t lowIndex) {
int16_t v = ((int16_t) gyroBuf[highIndex]) << 8 | gyroBuf[lowIndex];
return ((float) -v) * gyroRange / (float) 0x8000;
}
float MPU9250_gyroX(void) {
return MPU9250_gyroGet(0, 1);
}
float MPU9250_gyroY(void) {
return MPU9250_gyroGet(2, 3);
}
float MPU9250_gyroZ(void) {
return MPU9250_gyroGet(4, 5);
}
header file:
#ifndef __MPU9250__H__ #define __MPU9250__H__ #include "stdint.h" #define Pi 3.14159 #define ACC_FULL_SCALE_2_G 0x00 #define ACC_FULL_SCALE_4_G 0x08 #define ACC_FULL_SCALE_8_G 0x10 #define ACC_FULL_SCALE_16_G 0x18 #define GYRO_FULL_SCALE_250_DPS 0x00 #define GYRO_FULL_SCALE_500_DPS 0x08 #define GYRO_FULL_SCALE_1000_DPS 0x10 #define GYRO_FULL_SCALE_2000_DPS 0x18 #define MPU9250_ADDR_ACCELCONFIG 0x1C #define MPU9250_ADDR_INT_PIN_CFG 0x37 #define MPU9250_ADDR_ACCEL_XOUT_H 0x3B #define MPU9250_ADDR_GYRO_XOUT_H 0x43 #define MPU9250_ADDR_PWR_MGMT_1 0x6B #define MPU9250_ADDR_WHOAMI 0x75 //accelerartion part int8_t MPU9250_beginAccel(uint8_t mode); float MPU9250_accelX(void); float MPU9250_accelY(void); float MPU9250_accelZ(void); int8_t MPU9250_accelUpdate(void); //gyro part int8_t MPU9250_beginGyro(uint8_t mode); int8_t MPU9250_gyroUpdate(void); float MPU9250_gyroX(void); float MPU9250_gyroY(void); float MPU9250_gyroZ(void); #endif
main.c
#include <zephyr/kernel.h>
#include <zephyr/device.h>
#include <zephyr/devicetree.h>
/* STEP 3 - Include the header file of the I2C API */
#include <zephyr/drivers/i2c.h>
/* STEP 4.1 - Include the header file of printk() */
#include <zephyr/sys/printk.h>
#include "MPU9250.h"
int ret;
float ax,ay,az;
void main(void)
{
ret=MPU9250_beginAccel(ACC_FULL_SCALE_2_G);
if(ret !=0)
{
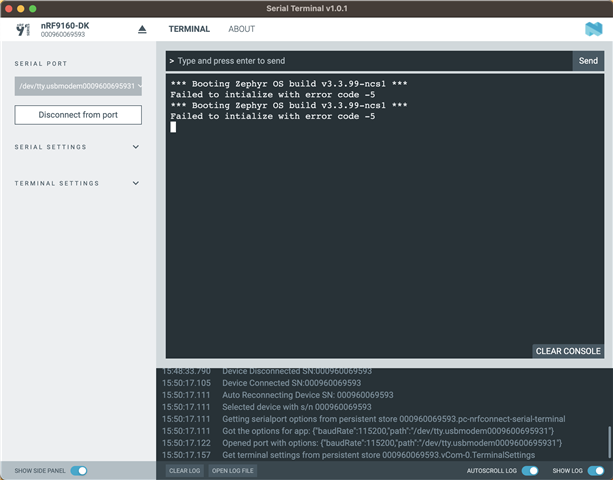
printk("Failed to intialize with error code %i\r\n",ret);
return ;
}
while (1)
{
ret=MPU9250_accelUpdate();
if(ret !=0)
{
printk("Failed to read with error code %i\r\n",ret);
return ;
}
ax=MPU9250_accelX();
ay=MPU9250_accelY();
az=MPU9250_accelZ();
printk("ax=%0.2f\t ay=%0.2f\t az=%0.2f",ax,ay,az);
k_msleep(10);
}
}
Serial output: