Hi
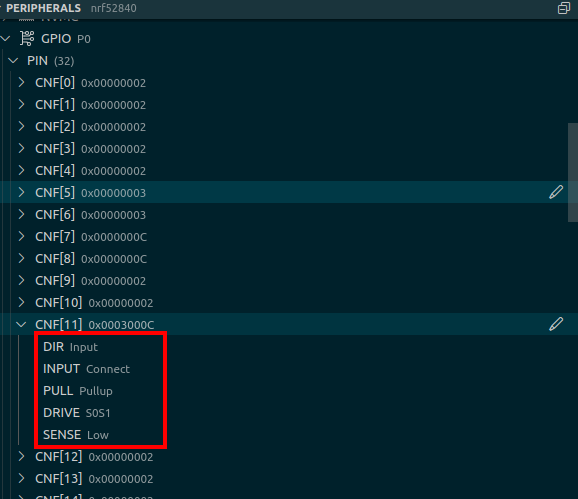
I have a nordic NRF52833 interfacing an IMU using I2C and an interrupt signal going to GPIO 13 on the NRF device.
I am using Zephyr and I was able to integrate the IMU driver LISD2/3H including the wake up interrupt. However, when trying to put the NRF to sleep and configuring the same pin as interrupt/GPIO, I don't get the interrupt. Wondering if I am missing a step.
Here is the main file:
/* main.c - Application main entry point */
/*
* Copyright (c) 2015-2016 Intel Corporation
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <zephyr/types.h>
#include <stddef.h>
#include <sys/printk.h>
#include <sys/util.h>
#include <device.h>
#include <bluetooth/bluetooth.h>
#include <bluetooth/hci.h>
#include <drivers/sensor.h>
#include <drivers/gpio.h>
#include <stdio.h>
#include <device.h>
#include <init.h>
#include <pm/pm.h>
#include <pm/device.h>
#include <zephyr.h>
#include <hal/nrf_gpio.h>
#define DEVICE_NAME "VTTI_Beacon"
#define DEVICE_NAME_LEN (sizeof(DEVICE_NAME) - 1)
/* TWI instance ID. */
#define TWI_INSTANCE_ID 0
#define MAX_PENDING_TRANSACTIONS 33
#define LIS2DH12_MIN_QUEUE_SIZE 32
#define CONSOLE_LABEL DT_LABEL(DT_CHOSEN(zephyr_console))
#define BUSY_WAIT_S 2U
#define SLEEP_S 2U
#define SLEEP_S1 5U
/* Prevent deep sleep (system off) from being entered on long timeouts
* or `K_FOREVER` due to the default residency policy.
*
* This has to be done before anything tries to sleep, which means
* before the threading system starts up between PRE_KERNEL_2 and
* POST_KERNEL. Do it at the start of PRE_KERNEL_2.
*/
static int disable_ds_1(const struct device *dev)
{
ARG_UNUSED(dev);
pm_constraint_set(PM_STATE_SOFT_OFF);
return 0;
}
SYS_INIT(disable_ds_1, PRE_KERNEL_2, 0);
static int imu_flag = 0;
static void fetch_and_display(const struct device *sensor)
{
static unsigned int count;
struct sensor_value accel[3];
struct sensor_value temperature;
struct sensor_value value_x;
const char *overrun = "";
int rc = sensor_sample_fetch(sensor);
struct sensor_trigger trig;
++count;
if (rc == -EBADMSG) {
/* Sample overrun. Ignore in polled mode. */
if (IS_ENABLED(CONFIG_LIS2DH_TRIGGER)) {
overrun = "[OVERRUN] ";
}
rc = 0;
}
if (rc == 0) {
/*rc = sensor_channel_get(sensor,
SENSOR_CHAN_ACCEL_XYZ,
accel);*/
rc = sensor_channel_get(sensor, SENSOR_CHAN_ACCEL_X, &value_x);
}
if (rc < 0) {
printf("ERROR: Update failed: %d\n", rc);
} else {
/*printf("#%u @ %u ms: %sx %f , y %f , z %f",
count, k_uptime_get_32(), overrun,
value_x.val2,
sensor_value_to_double(&accel[1]),
sensor_value_to_double(&accel[2]));*/
if(imu_flag==0)
{
printf("Accel X Data: %d %d \n", value_x.val1, value_x.val2);
imu_flag = 1;
}
}
}
#ifdef CONFIG_LIS2DH_TRIGGER
static void trigger_handler(const struct device *dev,
const struct sensor_trigger *trig)
{
fetch_and_display(dev);
}
#endif
/*
* Set Advertisement data. Based on the Eddystone specification:
* https://github.com/google/eddystone/blob/master/protocol-specification.md
* https://github.com/google/eddystone/tree/master/eddystone-url
*/
static const struct bt_data ad[] = {
BT_DATA_BYTES(BT_DATA_FLAGS, BT_LE_AD_NO_BREDR),
BT_DATA_BYTES(BT_DATA_UUID16_ALL, 0xaa, 0xfe),
BT_DATA_BYTES(BT_DATA_SVC_DATA16,
0xaa, 0xfe, /* Eddystone UUID */
0x10, /* Eddystone-URL frame type */
0x00, /* Calibrated Tx power at 0m */
0x00, /* URL Scheme Prefix http://www. */
'v', 't', 't', 'i', '.', 'v','t','.',
'e', 'd', 'u',
0x08) /* .org */
};
/* Set Scan Response data */
static const struct bt_data sd[] = {
BT_DATA(BT_DATA_NAME_COMPLETE, DEVICE_NAME, DEVICE_NAME_LEN),
};
static void bt_ready(int err)
{
char addr_s[BT_ADDR_LE_STR_LEN];
bt_addr_le_t addr = {0};
size_t count = 1;
if (err) {
printk("Bluetooth init failed (err %d)\n", err);
return;
}
printk("Bluetooth initialized\n");
/* Start advertising */
err = bt_le_adv_start(BT_LE_ADV_NCONN_IDENTITY, ad, ARRAY_SIZE(ad),
sd, ARRAY_SIZE(sd));
if (err) {
printk("Advertising failed to start (err %d)\n", err);
return;
}
/* For connectable advertising you would use
* bt_le_oob_get_local(). For non-connectable non-identity
* advertising an non-resolvable private address is used;
* there is no API to retrieve that.
*/
bt_id_get(&addr, &count);
bt_addr_le_to_str(&addr, addr_s, sizeof(addr_s));
printk("Beacon started, advertising as %s\n", addr_s);
}
void main(void)
{
int err;
printk("Starting Beacon Demo\n");
const struct device *sensor = DEVICE_DT_GET_ANY(st_lis2dh);
if (sensor == NULL) {
printf("No device found\n");
return;
}
if (!device_is_ready(sensor)) {
printf("Device %s is not ready\n", sensor->name);
return;
}
struct sensor_value value_x;
sensor_sample_fetch(sensor);
sensor_channel_get(sensor, SENSOR_CHAN_ACCEL_X, &value_x);
/* Initialize the Bluetooth Subsystem */
err = bt_enable(bt_ready);
if (err) {
printk("Bluetooth init failed (err %d)\n", err);
}
struct sensor_trigger trig;
int rc;
#if CONFIG_LIS2DH_TRIGGER
{
trig.type = SENSOR_TRIG_DATA_READY;
trig.chan = SENSOR_CHAN_ACCEL_XYZ;
if (IS_ENABLED(CONFIG_LIS2DH_ODR_RUNTIME)) {
struct sensor_value odr = {
.val1 = 1,
};
rc = sensor_attr_set(sensor, trig.chan,
SENSOR_ATTR_SAMPLING_FREQUENCY,
&odr);
if (rc != 0) {
printf("Failed to set odr: %d\n", rc);
return;
}
printf("Sampling at %u Hz\n", odr.val1);
}
rc = sensor_trigger_set(sensor, &trig, trigger_handler);
if (rc != 0) {
printf("Failed to set trigger: %d\n", rc);
return;
}
printf("Waiting for triggers\n");
/*while (true) {
k_sleep(K_MSEC(2000));
if(imu_flag==1)
{
rc = sensor_trigger_set(sensor, &trig, trigger_handler);
if (rc != 0) {
printf("Failed to set trigger: %d\n", rc);
return;
}
imu_flag = 0;
}
}*/
}
//int rc;
const struct device *cons = device_get_binding(CONSOLE_LABEL);
/* Configure to generate PORT event (wakeup) on button 1 press. */
nrf_gpio_cfg_input(DT_GPIO_PIN(DT_NODELABEL(button1), gpios),
NRF_GPIO_PIN_PULLUP);
nrf_gpio_cfg_sense_set(DT_GPIO_PIN(DT_NODELABEL(button1), gpios),
NRF_GPIO_PIN_SENSE_LOW);
printk("Busy-wait %u s\n", BUSY_WAIT_S);
k_busy_wait(BUSY_WAIT_S * USEC_PER_SEC);
printk("Busy-wait %u s with UART off\n", BUSY_WAIT_S);
rc = pm_device_action_run(cons, PM_DEVICE_ACTION_SUSPEND);
k_busy_wait(BUSY_WAIT_S * USEC_PER_SEC);
rc = pm_device_action_run(cons, PM_DEVICE_ACTION_RESUME);
printk("Sleep %u s\n", SLEEP_S);
k_sleep(K_SECONDS(SLEEP_S));
printk("Sleep %u s with UART off\n", SLEEP_S);
rc = pm_device_action_run(cons, PM_DEVICE_ACTION_SUSPEND);
k_sleep(K_SECONDS(SLEEP_S));
rc = pm_device_action_run(cons, PM_DEVICE_ACTION_RESUME);
printk("Sleep %u s\n", SLEEP_S1);
k_sleep(K_SECONDS(SLEEP_S1));
printk("Entering system off; press BUTTON1 to restart\n");
trig.type = SENSOR_TRIG_DATA_READY;
trig.chan = SENSOR_CHAN_ACCEL_XYZ;
if (IS_ENABLED(CONFIG_LIS2DH_ODR_RUNTIME)) {
struct sensor_value odr = {
.val1 = 1,
};
rc = sensor_attr_set(sensor, trig.chan,
SENSOR_ATTR_SAMPLING_FREQUENCY,
&odr);
if (rc != 0) {
printf("Failed to set odr: %d\n", rc);
return;
}
printf("Sampling at %u Hz\n", odr.val1);
}
rc = sensor_trigger_set(sensor, &trig, trigger_handler);
if (rc != 0) {
printf("Failed to set trigger: %d\n", rc);
return;
}
/* Configure to generate PORT event (wakeup) on button 1 press. */
nrf_gpio_cfg_input(DT_GPIO_PIN(DT_NODELABEL(button1), gpios),
NRF_GPIO_PIN_PULLUP);
nrf_gpio_cfg_sense_set(DT_GPIO_PIN(DT_NODELABEL(button1), gpios),
NRF_GPIO_PIN_SENSE_LOW);
/* Above we disabled entry to deep sleep based on duration of
* controlled delay. Here we need to override that, then
* force entry to deep sleep on any delay.
*/
pm_power_state_force(0u, (struct pm_state_info){PM_STATE_SOFT_OFF, 0, 0});
printk("ERROR: System off failed\n");
while (true) {
if(imu_flag==1)
{
rc = sensor_trigger_set(sensor, &trig, trigger_handler);
if (rc != 0) {
printf("Failed to set trigger: %d\n", rc);
return;
}
imu_flag = 0;
}
/* spin to avoid fall-off behavior */
}
#else /* CONFIG_LIS2DH_TRIGGER */
while (true) {
sensor_sample_fetch(sensor);
sensor_channel_get(sensor, SENSOR_CHAN_ACCEL_X, &value_x);
printf("Accel X Data: %d %d \n", value_x.val1, value_x.val2);
k_sleep(K_MSEC(100));
}
#endif /* CONFIG_LIS2DH_TRIGGER */
}