
Hello,
I am using an Adafruit Feather with NRF52840 IC to interface with a BNO085 IMU over SPI. I am coding using the NRF Connect Zephyr environment in VS Code. I have gotten communication between the two devices almost working, but a high MOSI pin during read is messing up my transfer.
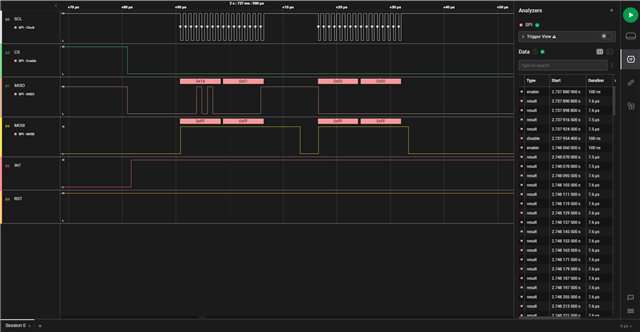
The BNO works by first having an initialization stage, and then a timed output stage. Anytime I perform an spi_read command, I have found that my MOSI pin is going high. This is fine during the init stage, but screws up the output stage. I have found that unplugging the MOSI after init leads to a working output reading, otherwise the program freezes after a single read. Is there a way I can configure the MOSI not to go high?
Logic Analyzer showing the high MOSI during a read:
SPI main.c configuration:
#define SPI1_NODE DT_NODELABEL(spi1)
static const struct device *spi1_dev = DEVICE_DT_GET(SPI1_NODE);
static struct spi_config spi_cfg ={
.frequency = 1000000, //125000U
.operation = SPI_WORD_SET(8) | SPI_TRANSFER_MSB | SPI_OP_MODE_MASTER | SPI_MODE_CPOL | SPI_MODE_CPHA, //SPI_MODE_CPHA
.slave = 0,
};
SPI read command:
gpio_pin_set(gpio1_dev, CS_PIN, 0);
struct spi_buf rx_buf2 = {
.buf = pBuffer,
.len = packet_size,
};
const struct spi_buf_set rx2 = {
.buffers = &rx_buf2,
.count = 1
};
if (spi_read(spi1_dev, &spi_cfg, &rx2)) {
printk("SPI Read Failed\r\n");
return 0;
}
gpio_pin_set(gpio1_dev, CS_PIN, 1);
Full prj.conf:
CONFIG_USB_DEVICE_STACK=y CONFIG_USB_DEVICE_PRODUCT="Zephyr USB console sample" CONFIG_USB_DEVICE_PID=0x0004 CONFIG_USB_DEVICE_INITIALIZE_AT_BOOT=n CONFIG_SERIAL=y CONFIG_CONSOLE=y CONFIG_UART_CONSOLE=y CONFIG_UART_LINE_CTRL=y CONFIG_STDOUT_CONSOLE=y CONFIG_UART_INTERRUPT_DRIVEN=y CONFIG_CONSOLE_SUBSYS=y CONFIG_CONSOLE_GETCHAR=y CONFIG_SPI=y CONFIG_GPIO=y CONFIG_SPI_NRFX=y CONFIG_NRFX_SPIM3=y CONFIG_CBPRINTF_FP_SUPPORT=y
Board File:
&pinctrl {
spi1_default: spi1_default {
group1 {
psels = <NRF_PSEL(SPIM_SCK, 0, 14)>,
<NRF_PSEL(SPIM_MISO, 0, 15)>,
<NRF_PSEL(SPIM_MOSI, 0, 13)>;
};
};
spi1_sleep: spi1_sleep {
group1 {
psels = <NRF_PSEL(SPIM_SCK, 0, 14)>,
<NRF_PSEL(SPIM_MISO, 0, 15)>,
<NRF_PSEL(SPIM_MOSI, 0, 13)>;
low-power-enable;
};
};
};
&spi1 {
compatible = "nordic,nrf-spim";
status = "okay";
//cs-gpios = <&gpio0 8 GPIO_ACTIVE_HIGH>;
pinctrl-0 = <&spi1_default>;
pinctrl-1 = <&spi1_sleep>;
pinctrl-names = "default", "sleep";
};
Thank you for the help
