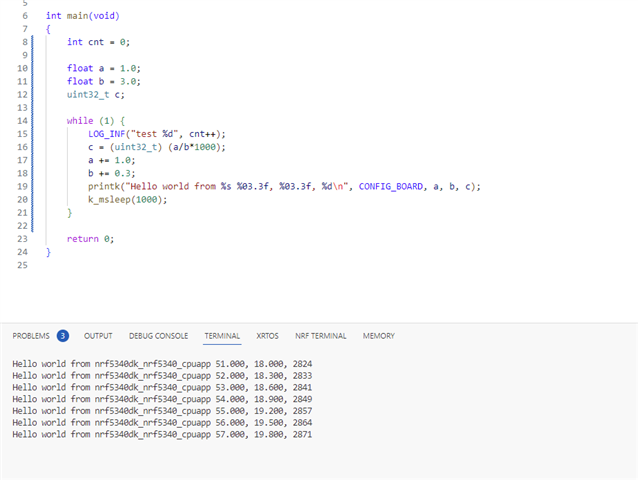
I'm attempting to perform PID control system calculations on the NRF5340 microcontroller. However, when I perform any floating-point computations, the result is always 0. I've tried enabling the following settings in prj.conf:
#CONFIG_FPU=y #CONFIG_FPU_SHARING=y
Unfortunately, enabling floating-point support causes the NRF5340 to crash. I'm having trouble understanding why floating-point operations are not functioning correctly. Could you please assist me in identifying any potential mistakes and determining the necessary settings to enable proper floating-point arithmetic? Thank you for your assistance.