Hello,
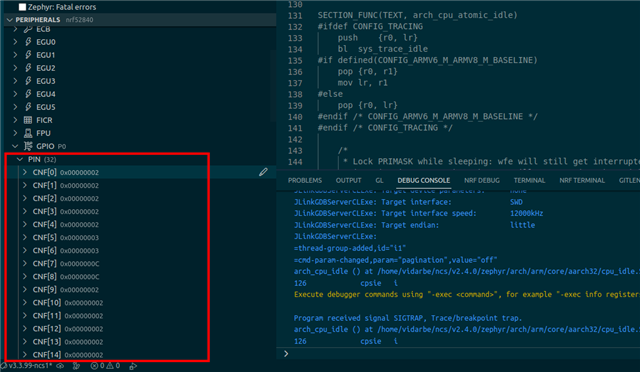
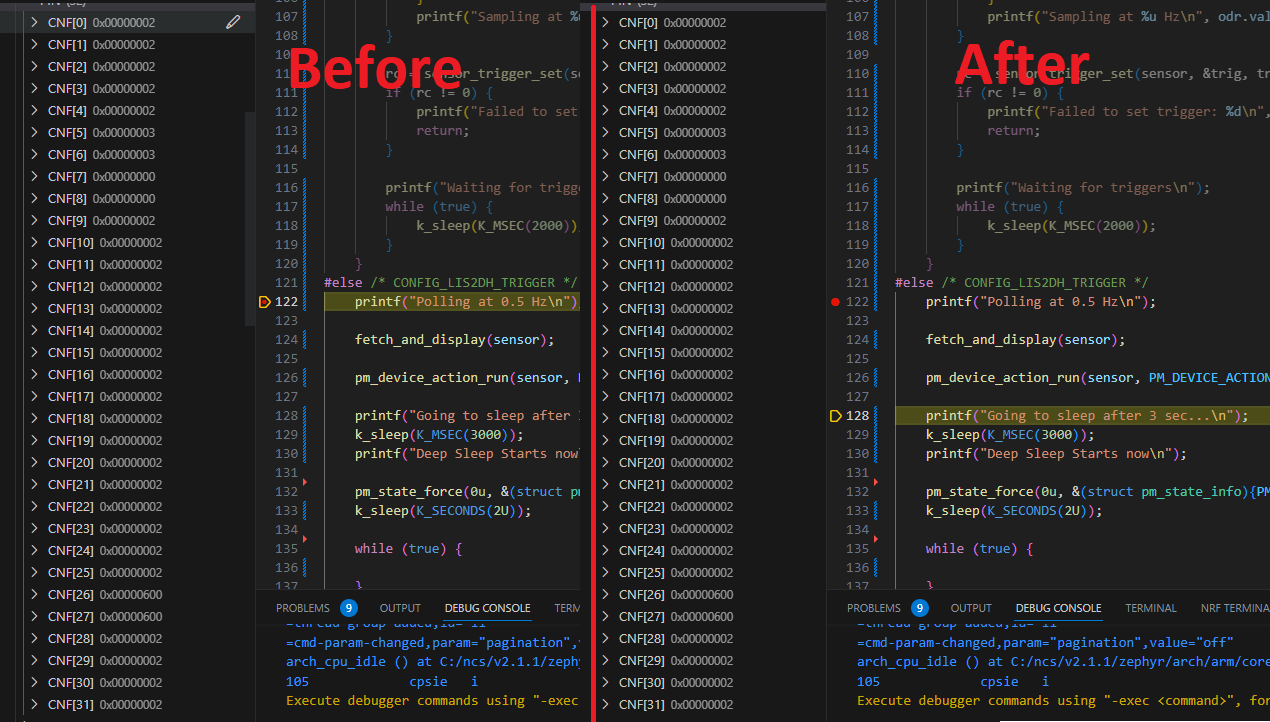
I'm working with LIS3DH sensor and I want to wakeup nRF52832 from system off by an interrupt from the sensor (not added the interrupt configuration yet). I'm using Zephyr OS v3.1.99 on a nRF52 DK, and I've merged two examples : nRF5x System Off demo and LIS2DH: Motion Sensor Monitor. The problem is, whenever I put the chip in system off mode, It will reset immediately, but if I suspend the sensor driver using pm_device_action_run(), it won't reset anymore. I don't know what's going on, can someone explain the reason?
This is the main.c :
/*
* Copyright (c) 2019 Nordic Semiconductor ASA
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <stdio.h>
#include <zephyr/zephyr.h>
#include <zephyr/device.h>
#include <zephyr/drivers/sensor.h>
#include <zephyr/pm/pm.h>
#include <zephyr/pm/device.h>
#include <zephyr/pm/policy.h>
#include <hal/nrf_gpio.h>
#include <zephyr/drivers/i2c.h>
#include <zephyr/init.h>
static void fetch_and_display(const struct device *sensor)
{
static unsigned int count;
struct sensor_value accel[3];
struct sensor_value temperature;
const char *overrun = "";
int rc = sensor_sample_fetch(sensor);
++count;
if (rc == -EBADMSG) {
/* Sample overrun. Ignore in polled mode. */
if (IS_ENABLED(CONFIG_LIS2DH_TRIGGER)) {
overrun = "[OVERRUN] ";
}
rc = 0;
}
if (rc == 0) {
rc = sensor_channel_get(sensor,
SENSOR_CHAN_ACCEL_XYZ,
accel);
}
if (rc < 0) {
printf("ERROR: Update failed: %d\n", rc);
} else {
printf("#%u @ %u ms: %sx %f , y %f , z %f",
count, k_uptime_get_32(), overrun,
sensor_value_to_double(&accel[0]),
sensor_value_to_double(&accel[1]),
sensor_value_to_double(&accel[2]));
}
if (IS_ENABLED(CONFIG_LIS2DH_MEASURE_TEMPERATURE)) {
if (rc == 0) {
rc = sensor_channel_get(sensor, SENSOR_CHAN_DIE_TEMP, &temperature);
if (rc < 0) {
printf("\nERROR: Unable to read temperature:%d\n", rc);
} else {
printf(", t %f\n", sensor_value_to_double(&temperature));
}
}
} else {
printf("\n");
}
}
#ifdef CONFIG_LIS2DH_TRIGGER
static void trigger_handler(const struct device *dev,
const struct sensor_trigger *trig)
{
fetch_and_display(dev);
}
#endif
void main(void)
{
const struct device *sensor = DEVICE_DT_GET_ANY(st_lis2dh);
if (sensor == NULL) {
printf("No device found\n");
return;
}
if (!device_is_ready(sensor)) {
printf("Device %s is not ready\n", sensor->name);
return;
}
#if CONFIG_LIS2DH_TRIGGER
{
struct sensor_trigger trig;
int rc;
trig.type = SENSOR_TRIG_DATA_READY;
trig.chan = SENSOR_CHAN_ACCEL_XYZ;
if (IS_ENABLED(CONFIG_LIS2DH_ODR_RUNTIME)) {
struct sensor_value odr = {
.val1 = 1,
};
rc = sensor_attr_set(sensor, trig.chan,
SENSOR_ATTR_SAMPLING_FREQUENCY,
&odr);
if (rc != 0) {
printf("Failed to set odr: %d\n", rc);
return;
}
printf("Sampling at %u Hz\n", odr.val1);
}
rc = sensor_trigger_set(sensor, &trig, trigger_handler);
if (rc != 0) {
printf("Failed to set trigger: %d\n", rc);
return;
}
printf("Waiting for triggers\n");
while (true) {
k_sleep(K_MSEC(2000));
}
}
#else /* CONFIG_LIS2DH_TRIGGER */
printf("Polling at 0.5 Hz\n");
fetch_and_display(sensor);
pm_device_action_run(sensor, PM_DEVICE_ACTION_SUSPEND);
printf("Going to sleep after 3 sec...\n");
k_sleep(K_MSEC(3000));
printf("Deep Sleep Starts now\n");
pm_state_force(0u, &(struct pm_state_info){PM_STATE_SOFT_OFF, 0, 0});
k_sleep(K_SECONDS(2U));
while (true) {
}
#endif /* CONFIG_LIS2DH_TRIGGER */
}
prj.conf :
CONFIG_STDOUT_CONSOLE=y CONFIG_I2C=y CONFIG_SENSOR=y CONFIG_CBPRINTF_FP_SUPPORT=y CONFIG_LIS2DH=y CONFIG_LIS2DH_ACCEL_RANGE_2G=y CONFIG_LIS2DH_OPER_MODE_LOW_POWER=y CONFIG_LIS2DH_ODR_1=y # CONFIG_LIS2DH_TRIGGER_GLOBAL_THREAD=y CONFIG_PM=y CONFIG_PM_DEVICE=y CONFIG_GPIO=y
dts.overlay :
&i2c0 {
lis3dh: lis3dh@19 {
status = "okay";
compatible = "st,lis2dh";
reg = <0x19 >;
};
};