Hi All,
Im very new to this how firmware space and would love some help.
Currently i have a NRF52840 DK Board with a Seeed Canbus shield. (CAN-BUS Shield V2.0 | Seeed Studio Wiki)
From what i have read is very similar to the DFROBOT CanBus Shield. (Only changing the default pinout for the CS from D10 to D9)
- I have been able to succesfully comple and flash the firmware but i get the following error :
Error starting CAN controller [-5]
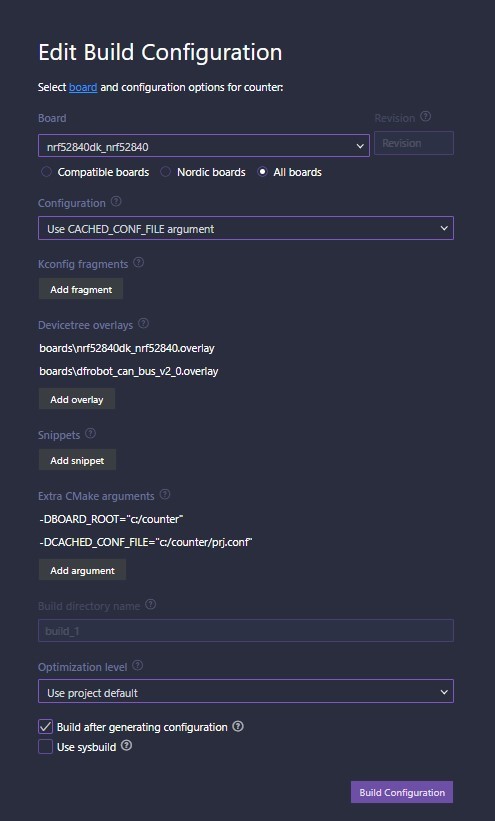
I have tried modifying the dfrobot_can_bus_v2_0.overlay to make it work with my seeed shield. (changing the CS-GPIOS to 15 (D9) instead of 16 (D10).
The error remains the same, and i dont really know how to get a little bit more information to progress on this.
Im trying to run this sample: zephyr/samples/drivers/can/counter at main · zephyrproject-rtos/zephyr (github.com)