Dear Support Team
I use the nRF5 SDK's ble_app_uart_c sample and ble_app_uart sample to test peripheral send data to central. On the application layer, I called ble_nus_data_send() founction to send one packet which 10bytes per 20ms and the BLE connection interval I set is 20ms. Below is my 20ms callback function implementation.
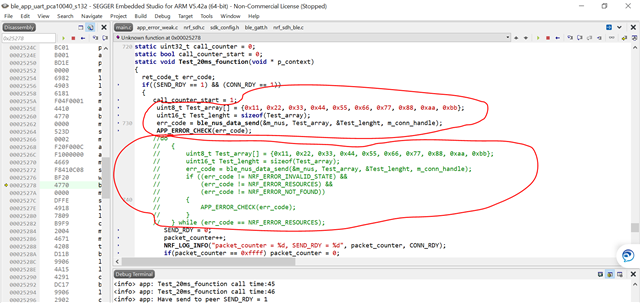
static void Test_20ms_founction(void * p_context)
{
ret_code_t err_code;
if((SEND_RDY == 1) && (CONN_RDY == 1))
{
call_counter_start = 1;
do
{
uint8_t Test_array[] = {0x11, 0x22, 0x33, 0x44, 0x55, 0x66, 0x77, 0x88, 0xaa, 0xbb};
uint16_t Test_lenght = sizeof(Test_array);
err_code = ble_nus_data_send(&m_nus, Test_array, &Test_lenght, m_conn_handle);
if ((err_code != NRF_ERROR_INVALID_STATE) &&
(err_code != NRF_ERROR_RESOURCES) &&
(err_code != NRF_ERROR_NOT_FOUND))
{
APP_ERROR_CHECK(err_code);
}
} while (err_code == NRF_ERROR_RESOURCES);
SEND_RDY = 0;
packet_counter++;
NRF_LOG_INFO("packet_counter = %d, SEND_RDY = %d", packet_counter, CONN_RDY);
if(packet_counter == 0xffff) packet_counter = 0;
}
if(call_counter_start == 1)
{
call_counter++;
if(call_counter == 0xffff) call_counter = 0;
NRF_LOG_INFO("Test_20ms_founction call time:%d",call_counter)
}
}
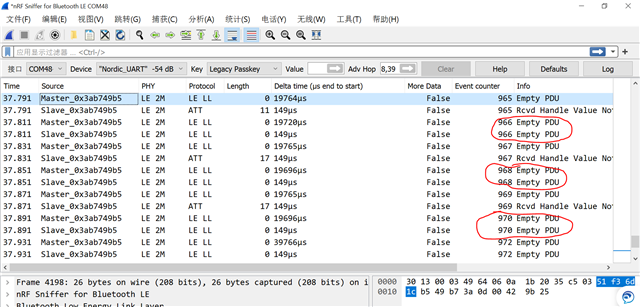
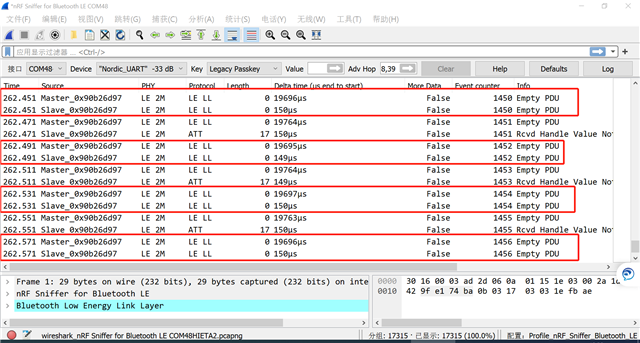
But I used the Sniffer to catch the packet on the air, But there are empty PDUs in some connection event like picture below, I would like to know what cause this and how to void these empty packet. Because l would like to send one packet per 20ms on the air but in fact it send one packet per 40ms .
The enclosed file is my code. many thanks.