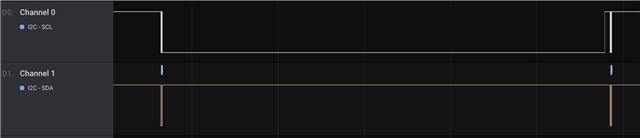
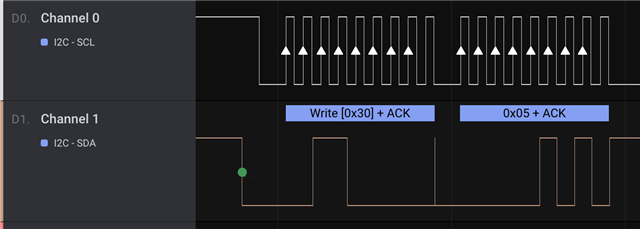
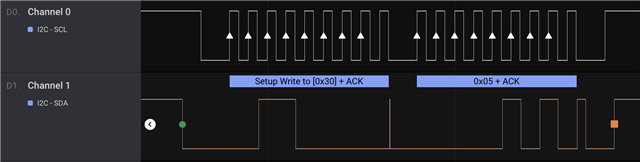
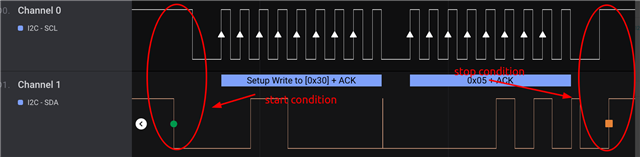
I am using TWI0 for MCP9808 and I notice that a single Write operation causes two Writes (one without a stop condition while the 2nd one with a stop condition)
void handler(nrf_drv_twi_evt_t const * p_event, void * p_context)
{
Sensor* sensor = static_cast<Sensor*>(p_context);
switch (p_event->type)
{
case NRF_DRV_TWI_EVT_DONE:
if (p_event->xfer_desc.type == NRF_DRV_TWI_XFER_TX)
{
m_xfer_done = true;
}
break;
default:
break;
}
}
void Sensor::Write(uint8_t reg, uint8_t size)
{
ret_code_t error_code = nrf_drv_twi_tx(&m_twi, SENSOR_ADDR, ®, size, false);
APP_ERROR_CHECK(error_code);
while(!m_xfer_done); // set by the ISR
}
void Sensor::Start()
{
i2cConfig =
{
.scl = TWI_SCLK,
.sda = TWI_SDA,
.frequency = static_cast<nrf_drv_twi_frequency_t> (TWI_FREQ),
.interrupt_priority = TWI_IRQ_PRIORITY,
.clear_bus_init = false
};
ret_code_t err_code = nrf_drv_twi_init(&m_twi, &mI2cConfig, handler, this);
APP_ERROR_CHECK(err_code);
nrf_drv_twi_enable(&m_twi);
Write(0x5, 1); // send the register address that we'd be interfacing with
}
// main.cpp
Sensor sensor;
int main()
{
sensor.Start();
while(1);
}