
Hi,
I'm developing an IoT product using nRF52840 provided by Seeed (Xiao BLE) with a BME280 sensor connected via I2C on a custom PCB, without another peripheral that BME280 and passive components for I2C connection. I can't get low power consumption, even if I try the system_off Zephyr example.
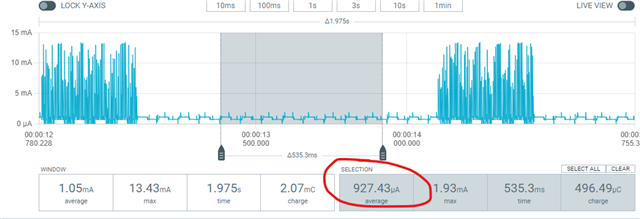
When I try the bme_280 example of Zephyr and enable the PM/PM_DEVICE features, the consumption is still so high (about 1mA). I need that it consumes a few hundred uA . An strange ripple between BME280 measurements is seen when I measure current using PPK2:
- My config file:
-
CONFIG_SENSOR=y CONFIG_PM=y CONFIG_PM_DEVICE=y
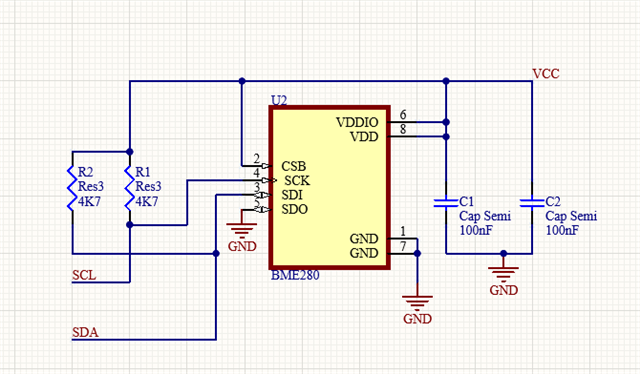
- I2C circuit Diagram (VCC=3V3):
- Overlay file:
&i2c1 {
status = "okay";
bme280@76 {
compatible = "bosch,bme280";
reg = <0x76>;
};
};
- Zephyr version: 3.2.99
- nRF Connect version:2.3.0
I also tried:
- Turn OFF Serial (CONFIG_SERIAL=n)
- Same for logging, adc, etc.
- Disabling QSPI and changing SPI in overlay file (like this post https://forum.seeedstudio.com/t/low-power-with-xiao-nrf52840-on-zephyr-rtos/270491)
- Disabling BME280 on I2C in overlay file make the ripple disappear.
- I've checked the bme_280.c driver file of Zephyr, and it manage OK the Power Management policy.
I don't know what can I try.
Thanks


