Good Day.
I am using a custom board based on an nRF52840 microcontroller and a RYS8830 GNSS receiver connected to it via UART0.
SDK v2.5.99 (Toolchain v2.5.0).
I want to get the coordinates of the board location (via asynchronous UART0) and output them to the terminal (via RTT and SWDIO programming connector ).
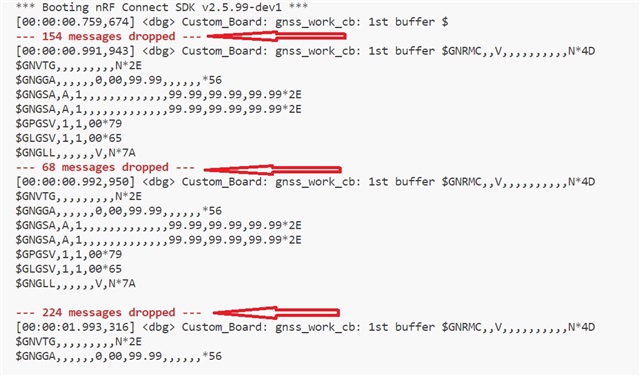
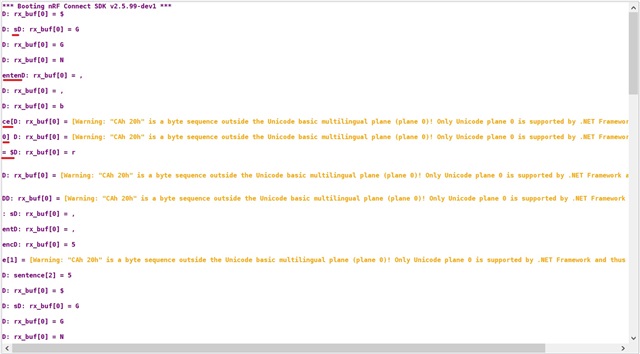
Could you please tell me how to correctly process incoming data from GNSS (NMEA message packet that arrives once per second) via UART?
1. What is the correct action I should take in the UART callback function (uart_cb) when an NMEA data packet arrives (UART_RX_RDY)?
2. In which part of the program should actions be performed to process incoming data? In the callback function (UART_RX_RDY), in the main function (main) or in an infinite loop (while(1))?
I apologize for such basic questions, it's just that I'm new to programming.
I hope for your understanding and help.
Thanks.