Hello!
I have added a UART and I2C to the Mesh Sensor Server example and on a custom NRF52840 board everything works fine.
Today I tried to add SPI without success.
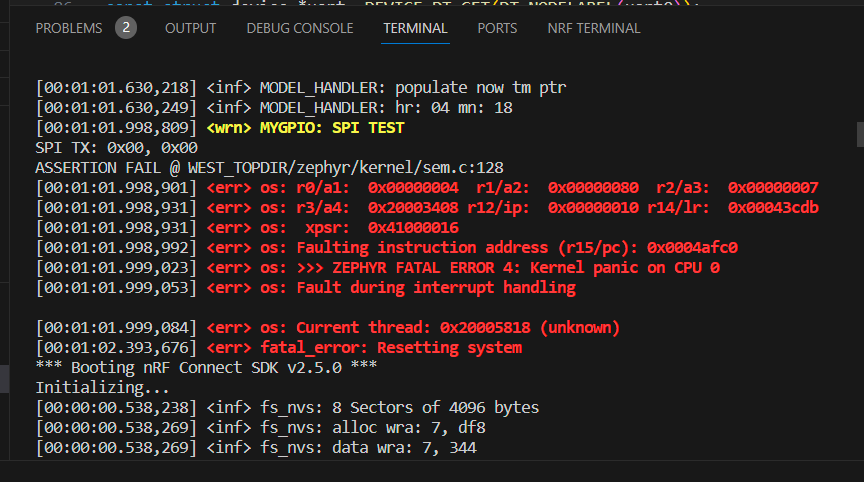
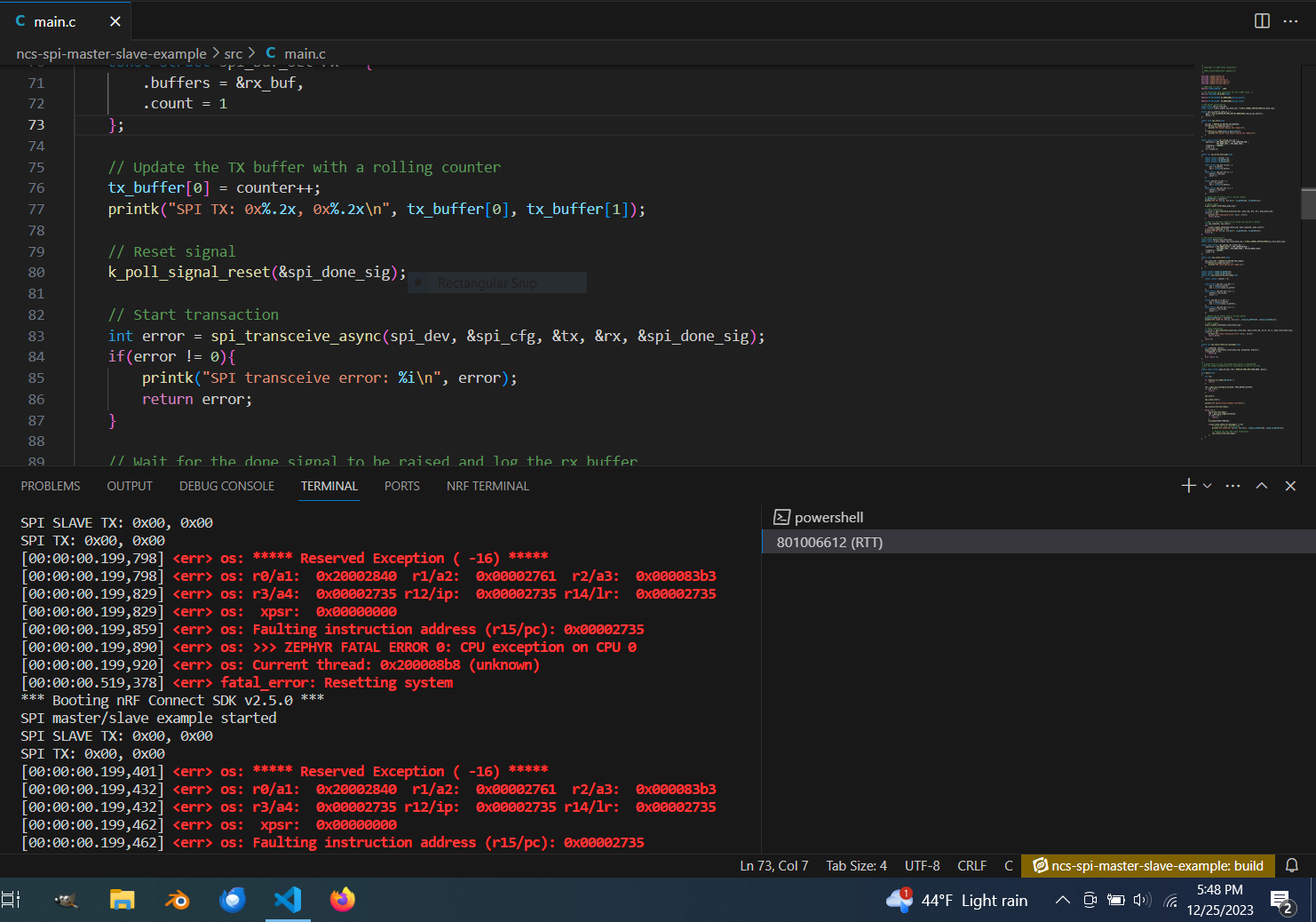
When I downloaded and built the ncs-spi-master-slave-example I get similar issues. The program crashes with the output shown in the screen shots. It seems to be interrupt related. I would be happy to use a SPI Master async or blocking function but can not seem to get that right either.
Please provide an example or suggestions for sending a few bytes to a SPI sensor and getting the result back in a NRF Connect / Zephyr project. I have a lot of SPI experience but I seem to be missing something here.
Thank you!
Regards,
David Carlin
From ncs-spi-master example
From my Mesh Sensor project: