Greetings,
I am fairly new to SPI interface. I tried interfacing my Winbond serial flash memory breakout board with nrf 5340 dk using the master-slave code that I found. I did modify the overlay file and main file to make it just master code. This is my overlay file.
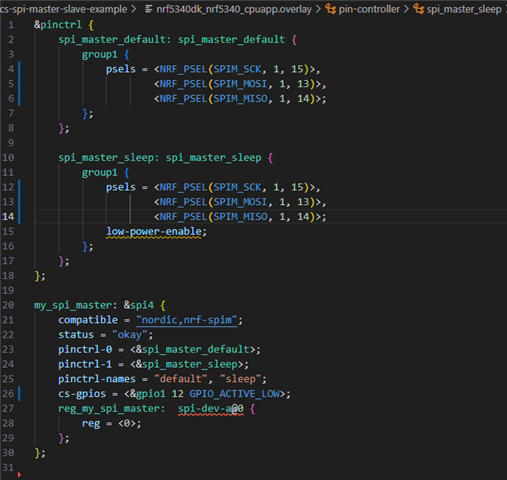
For the main file, I am only trying to see if SPI communication is established and get a manufacturer id for my flash memory. According to winbond datasheet, I guess I need to enable a reset instruction before reading the part id. Here is my main code:
#include <zephyr/kernel.h>
#include <zephyr/device.h>
#include <zephyr/devicetree.h>
#include <zephyr/drivers/gpio.h>
#include <zephyr/drivers/spi.h>
/* 1000 msec = 1 sec */
#define SLEEP_TIME_MS 1000
#define MY_SPI_MASTER DT_NODELABEL(my_spi_master)
// SPI master functionality
const struct device *spi_dev;
struct spi_cs_control spim_cs = {
.gpio = SPI_CS_GPIOS_DT_SPEC_GET(DT_NODELABEL(reg_my_spi_master)),
.delay = 0,
};
static const struct spi_config spi_cfg = {
.operation = SPI_WORD_SET(8) | SPI_MODE_CPHA,
.frequency = 130000000,
.slave = 0,
.cs = &spim_cs,
};
static void spi_init(void)
{
spi_dev = DEVICE_DT_GET(MY_SPI_MASTER);
if(!device_is_ready(spi_dev)) {
printk("SPI master device not ready!\n");
}
if(!device_is_ready(spim_cs.gpio.port)){
printk("SPI master chip select device not ready!\n");
}
}
// Function to send a single SPI instruction
static int send_spi_instruction(const struct device *spi_dev, const struct spi_config *spi_cfg, uint8_t instruction)
{
struct spi_buf tx_buf = {
.buf = &instruction,
.len = 1,
};
struct spi_buf_set tx_bufs = {
.buffers = &tx_buf,
.count = 1,
};
return spi_write(spi_dev, spi_cfg, &tx_bufs);
}
// Function to perform a software reset on the W25Q128JV
static void reset_flash_device(const struct device *spi_dev, const struct spi_config *spi_cfg)
{
int err;
// Send Enable Reset instruction (66h)
err = send_spi_instruction(spi_dev, spi_cfg, 0x66);
if (err) {
printk("Failed to send Enable Reset instruction: %d\n", err);
return;
}
// Wait a little bit to ensure the instruction is processed
k_sleep(K_MSEC(1));
// Send Reset instruction (99h)
err = send_spi_instruction(spi_dev, spi_cfg, 0x99);
if (err) {
printk("Failed to send Reset instruction: %d\n", err);
return;
}
// Wait for the device to reset
k_sleep(K_USEC(30)); // Waiting more than tRST (30μS) as per the datasheet
printk("Flash device reset successfully.\n");
}
static void read_part_id(void) {
// Command to read Manufacturer and Device ID, followed by 3 dummy bytes for the address
uint8_t cmd[] = {0x90, 0x00, 0x00, 0x00};
uint8_t id_data[2]; // Buffer to store the Manufacturer ID and Device ID
// Set up the transmit buffer
struct spi_buf tx_buf = {
.buf = cmd,
.len = sizeof(cmd)
};
struct spi_buf_set tx_bufs = {
.buffers = &tx_buf,
.count = 1
};
// Set up the receive buffer
struct spi_buf rx_buf = {
.buf = id_data,
.len = sizeof(id_data)
};
struct spi_buf_set rx_bufs = {
.buffers = &rx_buf,
.count = 1
};
// Send the command and read back the ID data
int err = spi_transceive(spi_dev, &spi_cfg, &tx_bufs, &rx_bufs);
if (err) {
printk("Failed to read Part ID\n");
return;
}
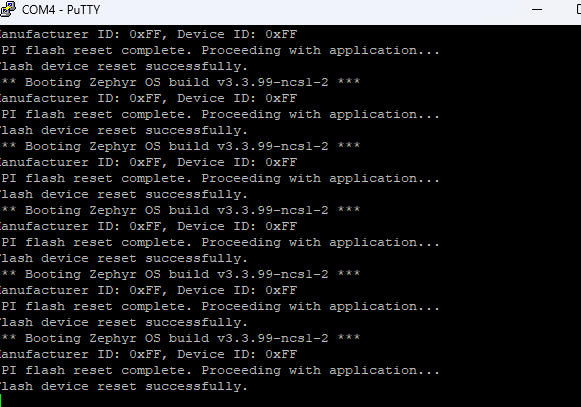
printk("Manufacturer ID: 0x%X, Device ID: 0x%X\n", id_data[0], id_data[1]);
}
void main(void)
{
int ret;
spi_init();
read_part_id(); // Read and print the Part ID
printk("SPI flash reset complete. Proceeding with application...\n");
reset_flash_device(spi_dev, &spi_cfg);
}My wiring details:
Winbond W25Q128JV nrf5340DK
3.3V Vdd
cs P1.12(SS)
clk P1.15SCK
DI P1.13MOSI
DO P1.14MISO
WP pulled high(active low)
HLD pulled high(active low)
GND GND
My serial terminal output is always 0xff. I am not sure if my SPI communication has been properely established or not. Here is the screenshot of my terminal