Windows 10, Zephyr version: 3.3.99 (C:/ncs/v2.4.2/zephyr)
Tools: I am using Zephyr, Vscode with nrf52dk and temperature sensor stts751.
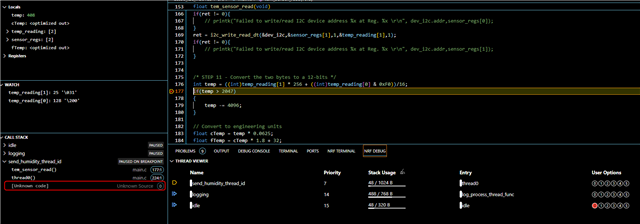
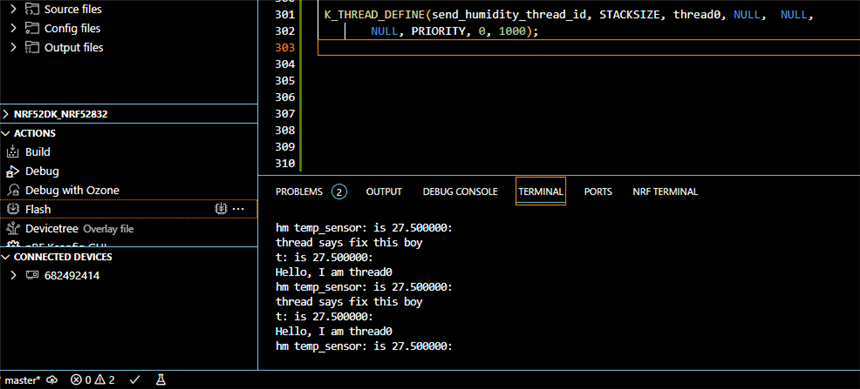
freezing behavior or constant values from sensor when I pass thread0 to K_THREAD_DEFINE
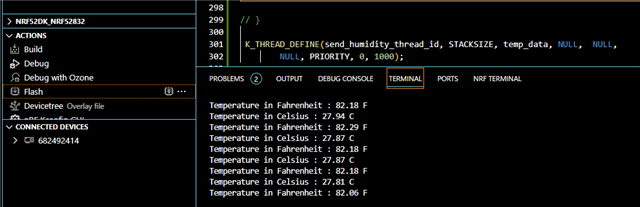
usual behavior of the sensor while passing temp_data to K_THREAD_DEFINE.
temp_data is split in to two functions temp_sensor_init() and tem_sensor_read() in thread0 and I am getting this former response. I was unable to understand why!
/* * Copyright (c) 2016 Intel Corporation * * SPDX-License-Identifier: Apache-2.0 */ #include <zephyr/kernel.h> #include <zephyr/device.h> #include <zephyr/devicetree.h> /* STEP 3 - Include the header file of the I2C API */ #include <zephyr/drivers/i2c.h> /* STEP 4.1 - Include the header file of printk() */ #include <zephyr/sys/printk.h> /* 1000 msec = 1 sec */ #define SLEEP_TIME_MS 1000 /* STEP 8 - Define the I2C slave device address and the addresses of relevant registers */ #define STTS751_TEMP_HIGH_REG 0x00 #define STTS751_TEMP_LOW_REG 0x02 #define STTS751_CONFIG_REG 0x03 #define STTS751_CONV_REG 0x04 #define STTS751_STATUS_REG 0x01 #define PRIORITY 7 #define STACKSIZE 1024 /* STEP 6 - Get the node identifier of the sensor */ #define I2C0_NODE DT_NODELABEL(mysensor) static const struct i2c_dt_spec dev_i2c = I2C_DT_SPEC_GET(I2C0_NODE); void temp_data(void); float value; void temp_data(void) { int ret; /* STEP 7 - Retrieve the API-specific device structure and make sure that the device is ready to use */ // static const struct i2c_dt_spec dev_i2c = I2C_DT_SPEC_GET(I2C0_NODE); if (!device_is_ready(dev_i2c.bus)) { printk("I2C bus %s is not ready!\n\r",dev_i2c.bus->name); return; } /* STEP 9 - Setup the sensor by writing the value 0x8C to the Configuration register */ uint8_t config[2] = {STTS751_CONFIG_REG,0x8C}; ret = i2c_write_dt(&dev_i2c, config, sizeof(config)); if(ret != 0){ printk("Failed to write to I2C device address %x at Reg. %x \n", dev_i2c.addr,config[0]); return; } while(true) { /* STEP 10 - Read the temperature from the sensor */ uint8_t temp_reading[2]= {0}; uint8_t sensor_regs[2] ={STTS751_TEMP_LOW_REG,STTS751_TEMP_HIGH_REG}; ret = i2c_write_read_dt(&dev_i2c,&sensor_regs[0],1,&temp_reading[0],1); if(ret != 0){ printk("Failed to write/read I2C device address %x at Reg. %x \r\n", dev_i2c.addr,sensor_regs[0]); } ret = i2c_write_read_dt(&dev_i2c,&sensor_regs[1],1,&temp_reading[1],1); if(ret != 0){ printk("Failed to write/read I2C device address %x at Reg. %x \r\n", dev_i2c.addr,sensor_regs[1]); } /* STEP 11 - Convert the two bytes to a 12-bits */ int temp = ((int)temp_reading[1] * 256 + ((int)temp_reading[0] & 0xF0)) / 16; if(temp > 2047) { temp -= 4096; } // Convert to engineering units double cTemp = temp * 0.0625; double fTemp = cTemp * 1.8 + 32; value=cTemp; //Print reading to console printk("Temperature in Celsius : %.2f C \n", value); printk("Temperature in Fahrenheit : %.2f F \n", fTemp); k_msleep(SLEEP_TIME_MS); } } void temp_sensor_init(void) { // #define SLEEP_TIME_MS 1000 /* STEP 8 - Define the I2C slave device address and the addresses of relevant registers */ /* STEP 6 - Get the node identifier of the sensor */ int ret=0; uint8_t temp_status_reading=0; uint8_t status_reg[1]={STTS751_STATUS_REG}; /* STEP 7 - Retrieve the API-specific device structure and make sure that the device is ready to use */ if (!device_is_ready(dev_i2c.bus)) { // printk("I2C bus %s is not ready!\n\r",dev_i2c.bus->name); return; } /* STEP 9 - Setup the sensor by writing the value 0x8C to the Configuration register */ uint8_t config1[2] = {STTS751_CONFIG_REG,0x8C}; ret = i2c_write_dt(&dev_i2c, config1, sizeof(config1)); if(ret != 0){ // printk("Failed to write to I2C device address %x at Reg. %x \n", dev_i2c.addr,config[0]); return; } uint8_t config2[2] = {STTS751_CONV_REG,0x08}; ret = i2c_write_dt(&dev_i2c, config2, sizeof(config2)); if(ret != 0){ // printk("Failed to write to I2C device address %x at Reg. %x \n", dev_i2c.addr,config[0]); return; } } float tem_sensor_read(void) { int ret; { /* STEP 10 - Read the temperature from the sensor */ uint8_t temp_reading[2]= {0}; uint8_t sensor_regs[2] ={STTS751_TEMP_LOW_REG,STTS751_TEMP_HIGH_REG}; ret = i2c_write_read_dt(&dev_i2c,&sensor_regs[0],1,&temp_reading[0],1); if(ret != 0){ // printk("Failed to write/read I2C device address %x at Reg. %x \r\n", dev_i2c.addr,sensor_regs[0]); } ret = i2c_write_read_dt(&dev_i2c,&sensor_regs[1],1,&temp_reading[1],1); if(ret != 0){ // printk("Failed to write/read I2C device address %x at Reg. %x \r\n", dev_i2c.addr,sensor_regs[1]); } /* STEP 11 - Convert the two bytes to a 12-bits */ int temp = ((int)temp_reading[1] * 256 + ((int)temp_reading[0] & 0xF0))/16; if(temp > 2047) { temp -= 4096; } // Convert to engineering units float cTemp = temp * 0.0625; float fTemp = cTemp * 1.8 + 32; k_msleep(SLEEP_TIME_MS); value=cTemp; printk("thread says fix this boy\n"); printk("t: is %f:\n",cTemp); return cTemp; } } void thread0(void) { float val; temp_sensor_init(); while (1) { val=tem_sensor_read(); /* STEP 3 - Call printk() to display a simple string "Hello, I am thread0" */ printk("Hello, I am thread0\n"); printk("hm temp_sensor: is %f:\n",val); /* STEP 10 - Put the thread to sleep */ k_msleep(1000); /* Remember to comment out the line from STEP 6 */ } } K_THREAD_DEFINE(send_humidity_thread_id, STACKSIZE, thread0, NULL, NULL, NULL, PRIORITY, 0, 1000);
Can anyone with thread creation and design aspect ,help me with debugging this issue, I am kind of stuck here for some time.Any constructive insights would be deeply appreciated.
Sigurd Hellesvik Could you suggest some thing here on the same? I could see that you have provided suggestions on similar topics to many.
Best regards,
Arron