hi professor,
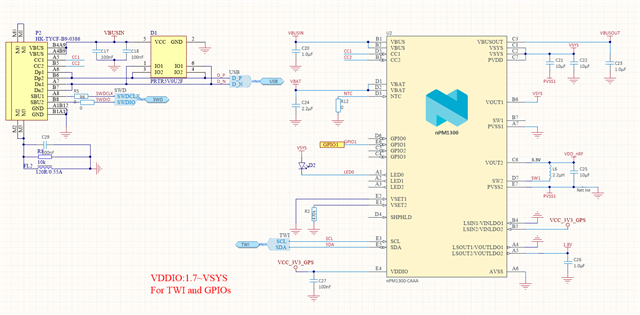
The npm1300 is used for power management on my borad.When VBAT and VBUS are connected simultaneously, the bulk 2 output power supply varies between 1V and 3.3V.When only VBUS is connected, the bulk 2 output voltage is fixed at 3.3V, which meets my expectations.
The chip version i am using is CAAACA 2335A1.Does this version of the chip have such characteristics that VBAT must be connected?
Here are the DTS fragments:
&arduino_i2c {
npm1300_ek_pmic: pmic@6b {
compatible = "nordic,npm1300";
reg = <0x6b>;
npm1300_ek_gpio: gpio-controller {
compatible = "nordic,npm1300-gpio";
gpio-controller;
#gpio-cells = <2>;
ngpios = <5>;
};
npm1300_ek_regulators: regulators {
compatible = "nordic,npm1300-regulator";
/* limits are set to min/max allowed values */
npm1300_ek_buck1: BUCK1 {
regulator-min-microvolt = <1800000>;
regulator-max-microvolt = <3300000>;
/delete-property/ regulator-init-microvolt;
};
npm1300_ek_buck2: BUCK2 {
regulator-min-microvolt = <1000000>;
regulator-max-microvolt = <3300000>;
regulator-init-microvolt = <3300000>;
regulator-always-on;
regulator-boot-on;
/delete-property/ retention-microvolt;
/delete-property/ enable-gpios;
/delete-property/ retention-gpios;
/delete-property/ pwm-gpios;
};
npm1300_ek_ldo1: LDO1 {
/delete-property/ regulator-min-microvolt;
/delete-property/ regulator-max-microvolt;
/delete-property/ regulator-initial-mode;
/delete-property/ enable-gpios;
};
npm1300_ek_ldo2: LDO2 {
regulator-min-microvolt = <1800000>;
regulator-max-microvolt = <3300000>;
regulator-init-microvolt = <1800000>;
regulator-initial-mode = <NPM1300_LDSW_MODE_LDO>;
regulator-always-on;
regulator-boot-on;
/delete-property/ enable-gpios;
};
};
npm1300_ek_charger: charger {
compatible = "nordic,npm1300-charger";
term-microvolt = <4200000>;
term-warm-microvolt = <4000000>;
current-microamp = <400000>;
dischg-limit-microamp = <1000000>;
vbus-limit-microamp = <500000>;
thermistor-ohms = <10000>;
thermistor-beta = <3380>;
charging-enable;
vbatlow-charge-enable;
};
npm1300_ek_buttons: buttons {
compatible = "gpio-keys";
pmic_button0: pmic_button_0 {
gpios = < &npm1300_ek_gpio 0 GPIO_ACTIVE_HIGH>;
label = "Pmic button switch 0";
zephyr,code = <INPUT_KEY_0>;
};
};
npm1300_ek_leds: leds {
compatible = "nordic,npm1300-led";
nordic,led0-mode = "host";
nordic,led1-mode = "charging";
nordic,led2-mode = "error";
};
};
};