Hello,
Currently, I am creating firmware that generates an IRQ_DIRECT_CONNECT interrupt at the timing when SPIM4 transfer is completed (ENDTX).
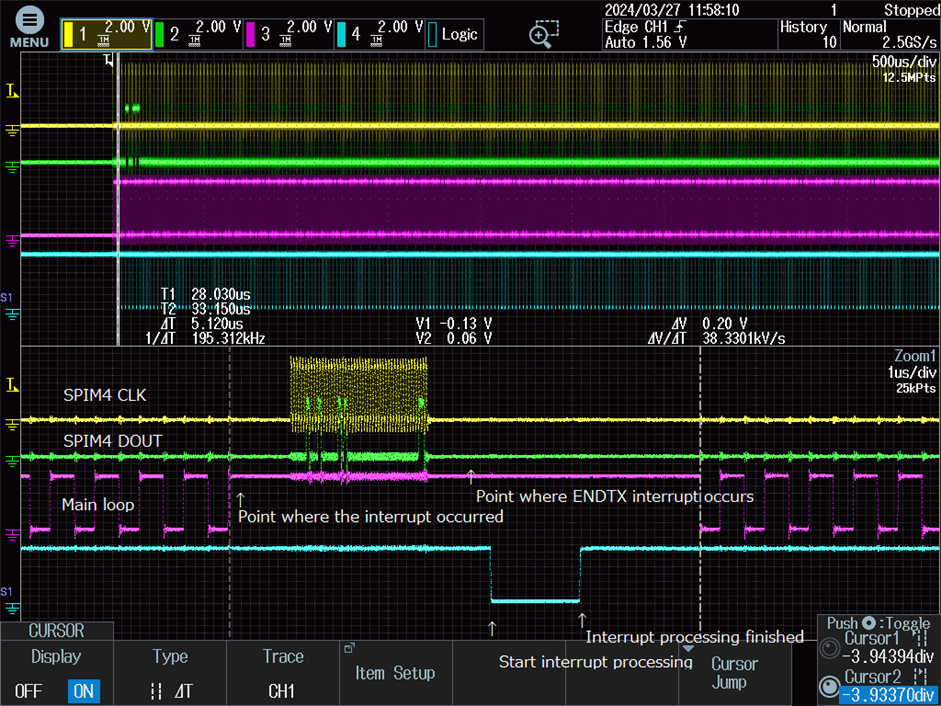
However, the interrupt timing is not at ENDTX but near the start of SPIM4 operation.
Since an interrupt occurs at the start, the current process is waiting for the ENDTX event within the interrupt. How should I set it to generate an interrupt at ENDTX?
IRQ_DIRECT_CONNECT and irq_enable settings:
IRQ_DIRECT_CONNECT(SPIM4_IRQn, 0,spim4_event_handler,IRQ_ZERO_LATENCY);
irq_enable(SPIM4_IRQn);
Interrupt handler settings:
static void spim4_event_handler(nrfx_spim_evt_t const*p_event, void *p_context)
{
while(NRF_SPIM4->EVENTS_ENDTX == 0){;}
NRF_SPIM4 -> EVENTS_ENDTX = 0x00000000;
}
Register settings before data transfer:
NRF_SPIM4 -> INTENCLR = 0x00080152;
NRF_SPIM4 -> INTENSET = 0x00000100;
Register settings after data transfer:
NRF_SPIM4 -> INTENCLR = 0x00000100;
best regard,