Hello, I am trying to communicate with a Bosch BMI 270 device(datasheet) using the nrf5340dk. I macgyvered something together from the bmi270 file in the zephyr/sensor folder and an example I found for SPI communication with the nrf5340dk.
Overlay file:
&gpio0 {
status = "okay";
};
&spi1 {
status = "okay";
bmi270@0 {
compatible = "bosch,bmi270";
reg = <0>;
spi-max-frequency = <DT_FREQ_M(10)>;
label = "BMI270";
};
pinctrl-0 = <&spi1_default>;
pinctrl-names = "default";
};
&pinctrl {
spi1_default: spi1_default {
group1 {
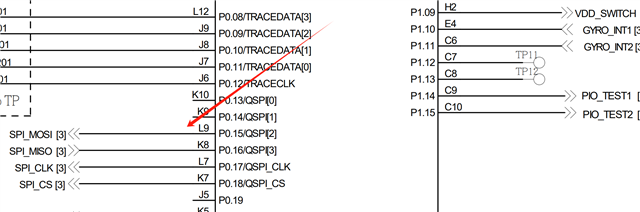
psels = <NRF_PSEL(SPIM_SCK, 0, 17)>,
<NRF_PSEL(SPIM_MOSI, 0, 15)>,
<NRF_PSEL(SPIM_MISO, 0, 16)>,
<NRF_PSEL(SPIS_CSN, 0, 18)>;
};
};
};
Project config:
CONFIG_I2C=n CONFIG_SPI=y CONFIG_GPIO=y CONFIG_SENSOR=y CONFIG_BMI270=y CONFIG_STDOUT_CONSOLE=y CONFIG_RTT_CONSOLE=y CONFIG_USE_SEGGER_RTT=y CONFIG_LOG_BACKEND_RTT=y CONFIG_UART_CONSOLE=n
Where it gets stuck in main.c(device_get_binding returns NULL, same with SPI):
int main(void)
{
const struct device *bmi270;
struct sensor_value acc[3], gyr[3];
struct sensor_value full_scale, sampling_freq, oversampling;
bmi270 = device_get_binding("BMI270");
if (!bmi270)
{
printk("Gyro: Device not found.\n");
return 0;
}
else
{
printk("Gyro: Device found.\n");
}
}