
Summary:
I must be doing something wrong when making the board files for a custom board (nRF52840 SOC), because I'm unable to initialize the LIS2DW12 using Zephyr's built-in sensor drivers.
Details:
Here's my device tree, you can see the relevant I2C portions where I'm configuring things for the LIS2DW12:
// Copyright (c) 2024 Nordic Semiconductor ASA
// SPDX-License-Identifier: Apache-2.0
/dts-v1/;
#include <nordic/nrf52840_qiaa.dtsi>
#include "type2ab_evb-pinctrl.dtsi"
/ {
model = "Type2AB_EVB";
compatible = "murata,type2ab-evb";
chosen {
zephyr,console = &uart0;
zephyr,shell-uart = &uart0;
zephyr,uart-mcumgr = &uart0;
zephyr,bt-mon-uart = &uart0;
zephyr,bt-c2h-uart = &uart0;
zephyr,sram = &sram0;
zephyr,flash = &flash0;
zephyr,code-partition = &slot0_partition;
};
leds {
compatible = "gpio-leds";
led0: led_0 {
gpios = <&gpio0 28 GPIO_ACTIVE_LOW>;
label = "Green LED 0";
};
led1: led_1 {
gpios = <&gpio0 21 GPIO_ACTIVE_LOW>;
label = "Red LED 0";
};
};
/* These aliases are provided for compatibility with samples */
aliases {
led0 = &led0;
led1 = &led1;
};
};
&gpiote {
status = "okay";
};
&gpio0 {
status = "okay";
sense-edge-mask = <0xffffffff>;
};
&gpio1 {
status = "okay";
sense-edge-mask = <0xffffffff>;
};
&i2c0 {
compatible = "nordic,nrf-twi";
status = "okay";
pinctrl-0 = <&i2c0_default>;
pinctrl-1 = <&i2c0_sleep>;
pinctrl-names = "default", "sleep";
lis2dw12: lis2dw12@19 {
compatible = "st,lis2dw12";
status = "okay"; // https://devzone.nordicsemi.com/f/nordic-q-a/107801/usage-of-interrupts-from-i2c-device
reg = <0x19>; // https://community.st.com/t5/mems-sensors/dts-configuration-for-lis2dw12/td-p/148824
power-mode=<0>;
};
};
&uart0 {
compatible = "nordic,nrf-uarte";
status = "okay";
current-speed = <115200>;
pinctrl-0 = <&uart0_default>;
pinctrl-1 = <&uart0_sleep>;
pinctrl-names = "default", "sleep";
};
&flash0 {
partitions {
compatible = "fixed-partitions";
#address-cells = <1>;
#size-cells = <1>;
boot_partition: partition@0 {
label = "mcuboot";
reg = <0x0 0xc000>;
};
slot0_partition: partition@c000 {
label = "image-0";
reg = <0xc000 0x72000>;
};
slot1_partition: partition@7e000 {
label = "image-1";
reg = <0x7e000 0x72000>;
};
scratch_partition: partition@f0000 {
label = "image-scratch";
reg = <0xf0000 0xa000>;
};
storage_partition: partition@fa000 {
label = "storage";
reg = <0xfa000 0x6000>;
};
};
};
Here's my source file showing how I'm initializing the device:
/*
* Copyright (c) 2016 Intel Corporation
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <zephyr/kernel.h>
// Basing the sensor stuff on this: https://github.com/nrfconnect/sdk-zephyr/blob/main/samples/shields/x_nucleo_iks01a3/standard/src/main.c or https://github.com/nrfconnect/sdk-zephyr/blob/main/drivers/sensor/st/lis2dw12/lis2dw12.c#L11
#include <zephyr/drivers/sensor.h>
#include <zephyr/device.h>
const struct device *const lis2dw12 = DEVICE_DT_GET_ONE(st_lis2dw12);
static void lis2dw12_config(const struct device *lis2dw12)
{
struct sensor_value odr_attr, fs_attr;
/* set LIS2DW12 accel/gyro sampling frequency to 100 Hz */
odr_attr.val1 = 100;
odr_attr.val2 = 0;
if (sensor_attr_set(lis2dw12, SENSOR_CHAN_ACCEL_XYZ,
SENSOR_ATTR_SAMPLING_FREQUENCY, &odr_attr) < 0) {
printk("Cannot set sampling frequency for LIS2DW12 accel\n");
return;
}
sensor_g_to_ms2(16, &fs_attr);
if (sensor_attr_set(lis2dw12, SENSOR_CHAN_ACCEL_XYZ,
SENSOR_ATTR_FULL_SCALE, &fs_attr) < 0) {
printk("Cannot set sampling frequency for LIS2DW12 gyro\n");
return;
}
}
int main(void)
{
const struct device *const lis2dw12 = DEVICE_DT_GET_ONE(st_lis2dw12);
if (!device_is_ready(lis2dw12)) {
printk("%s: device not ready.\n", lis2dw12->name);
return 0;
}
lis2dw12_config(lis2dw12);
while (1) {
k_msleep(1000);
}
return 0;
}
And here's the output I'm getting:
[00:00:00.786,773] <err> LIS2DW12: Not able to read dev id *** Booting nRF Connect SDK v3.5.99-ncs1 *** lis2dw12@19: device not ready.
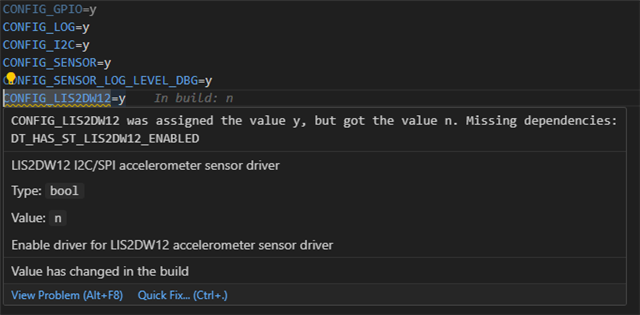
The reason I suspect it's device-tree related, is because when I try to enable CONFIG_LIS2DW12=y in the prj.conf file, I get the following:
Here's my board files:
/cfs-file/__key/support-attachments/beef5d1b77644c448dabff31668f3a47-c25bd29ee12544218166867fd8023a11/boards.zip
Here's my project:
/cfs-file/__key/communityserver-discussions-components-files/4/6763.sensor.zip

