
Hi,
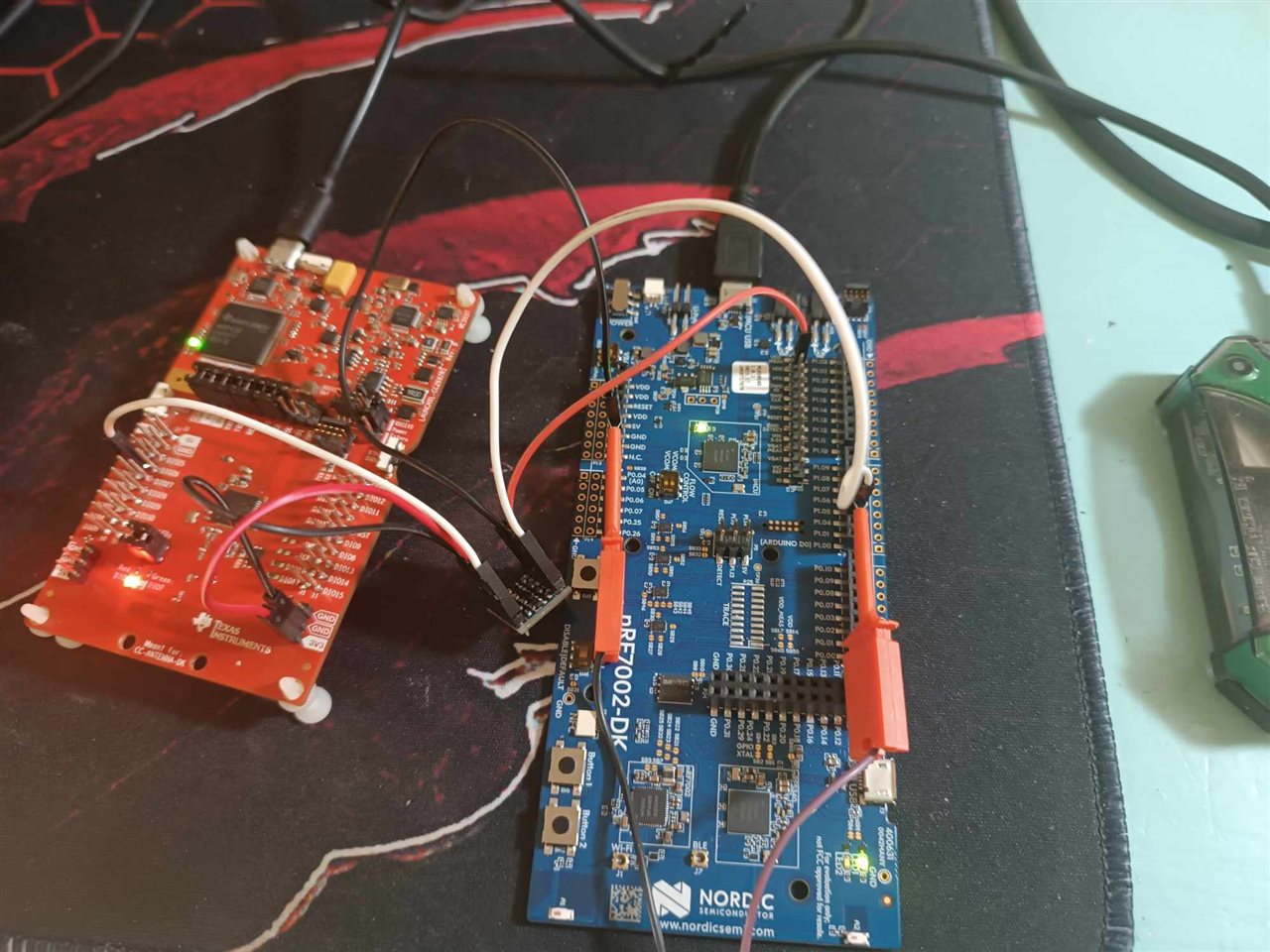
I am using nRF7002 DK. I have set P1.04 as UART RX. For testing I am using TI CC26x2R1 Launchpad to send UART data to nRF7002 DK. I use a logic level shifter board to convert the UART 3.3V to 1.8V. Here is my setup below.
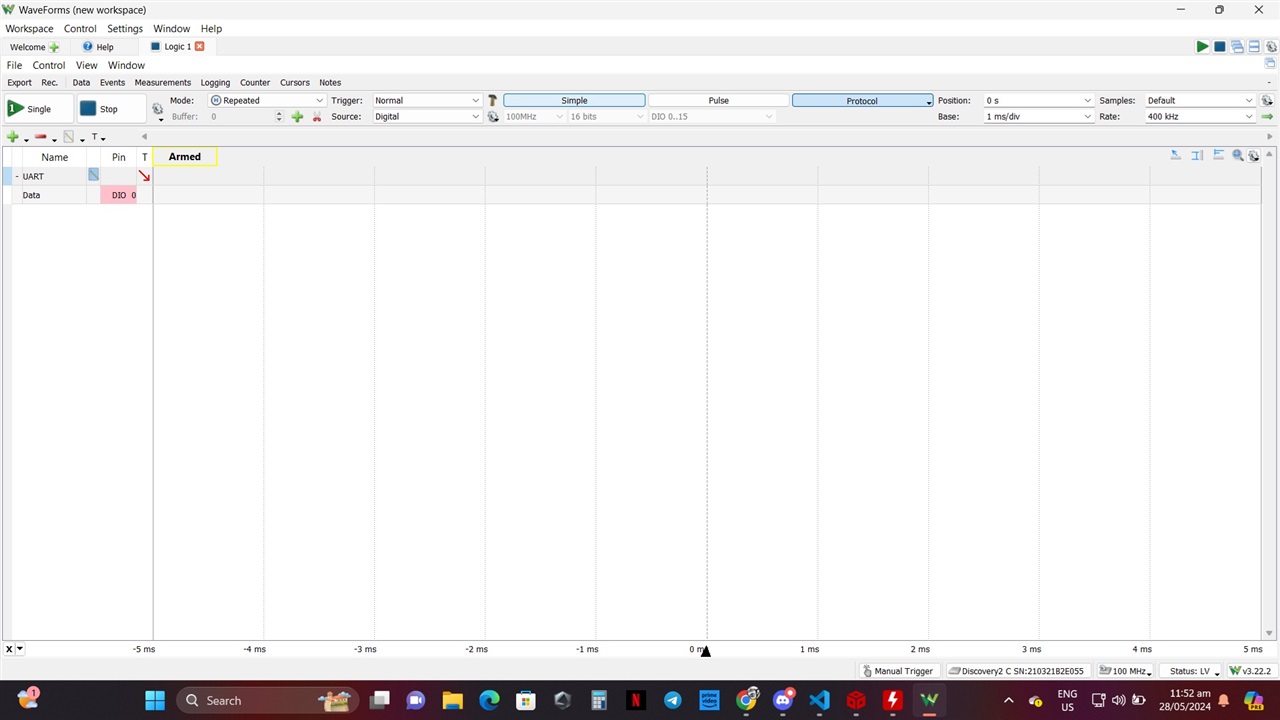
There is no UART activity from my logic analyzer capture.
How do I make this work?
Regards,
Markel

