Hello,
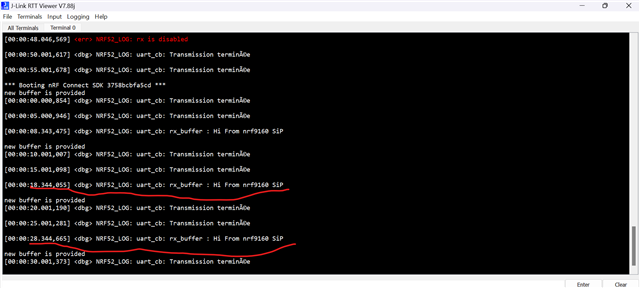
I'm attempting to establish communication between an nRF52840 and an nRF9160 on the nRF9160DK using LPUART. Initially, I tried using the interrupt-driven mode, but the uart_fifo_fill function only sends the packet once and then sends 0 bytes on both sides.
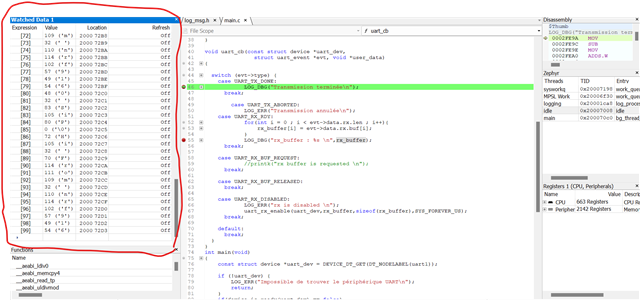
Next, I switched to the async mode API for LPUART by disabling the interrupt-driven mode. However, when I attempt to use uart_tx, it returns EBUSY.
Best Regards
Youssef