Hi there,
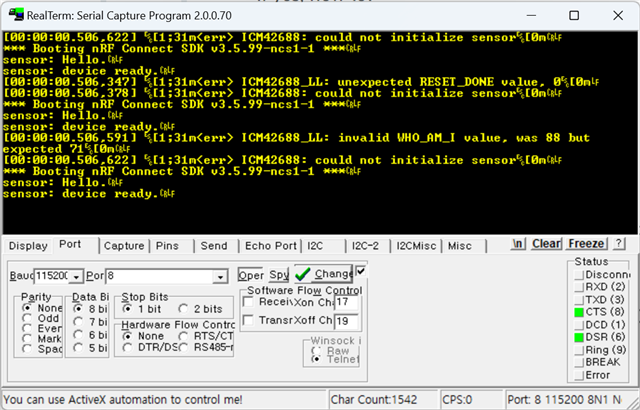
SPI device is not ready.
What's wrong?
NCS version: v2.6.1
&spi1 {
compatible = "nordic,nrf-spi";
status = "okay";
pinctrl-0 = <&spi1_default>;
pinctrl-names = "default";
max-frequency = <DT_FREQ_M(24)>;
cs-gpios = <&gpio0 15 GPIO_ACTIVE_LOW>;
icm42670p: icm42670p@0 {
compatible = "invensense,icm42670";
reg = <0>;
spi-max-frequency = <DT_FREQ_M(24)>;
accel-hz = <1600>;
accel-fs = <16>;
gyro-hz = <1600>;
gyro-fs = <2000>;
};
};
&pinctrl {
uart0_default: uart0_default {
group1 {
psels = <NRF_PSEL(UART_TX, 0, 6)>, <NRF_PSEL(UART_RX, 0, 8)>;
};
};
i2c0_default: i2c0_default {
group1 {
psels = <NRF_PSEL(TWIM_SCL, 0, 17)>, <NRF_PSEL(TWIM_SDA, 0, 18)>;
nordic,invert;
bias-pull-up;
};
};
spi1_default: spi1_default {
group1 {
psels = <NRF_PSEL(SPIM_SCK, 0, 14)>,
<NRF_PSEL(SPIM_MOSI, 0, 13)>,
<NRF_PSEL(SPIM_MISO, 0, 12)>;
};
};
};
#include <zephyr/kernel.h>
#include <zephyr/sys/printk.h>
#include <zephyr/devicetree.h>
#include <zephyr/drivers/spi.h>
// #include <zephyr/drivers/gpio.h>
// #include <zephyr/logging/log.h>
// #include <zephyr/device.h>
// #include <zephyr/drivers/uart/cdc_acm.h>
// #include <zephyr/drivers/uart.h>
#include <zephyr/bluetooth/bluetooth.h>
#include <zephyr/bluetooth/hci.h>
#include <zephyr/settings/settings.h>
#include "lib/bluetooth_manager/bluetooth_manager.h"
#include "lib/gpio/gpio.h"
#include "lib/magneto/magneto.h"
#define ICM42670P_NODE DT_NODELABEL(icm42670p)
const struct device *icm42670p_spec = DEVICE_DT_GET(ICM42670P_NODE);
struct spi_config spi_cfg = {
.frequency = DT_PROP(ICM42670P_NODE, spi_max_frequency),
.operation = SPI_WORD_SET(8) | SPI_TRANSFER_MSB | SPI_MODE_CPOL | SPI_MODE_CPHA,
.slave = DT_REG_ADDR(ICM42670P_NODE),
.cs = NULL,
};
#define ICM42670P_WHO_AM_I_REG 0x75
void read_icm42670p_who_am_i(void)
{
uint8_t tx_buffer[2] = {ICM42670P_WHO_AM_I_REG | 0x80, 0x00}; // 0x80 to set the read bit
uint8_t rx_buffer[2] = {0};
struct spi_buf tx_buf = {
.buf = tx_buffer,
.len = sizeof(tx_buffer),
};
struct spi_buf rx_buf = {
.buf = rx_buffer,
.len = sizeof(rx_buffer),
};
struct spi_buf_set tx = {
.buffers = &tx_buf,
.count = 1,
};
struct spi_buf_set rx = {
.buffers = &rx_buf,
.count = 1,
};
int ret = spi_transceive(icm42670p_spec, &spi_cfg, &tx, &rx);
if (ret < 0)
{
printk("SPI transaction failed: %d\n", ret);
}
else
{
printk("ICM42670P WHO_AM_I: 0x%02x\n", rx_buffer[1]);
}
}
int main(void) {
int err;
// Initialize the Bluetooth Subsystem
err = bt_enable(NULL);
if (err) {
printk("Bluetooth init failed (err %d)\n", err);
return 0;
}
printk("Bluetooth initialized\n");
if (IS_ENABLED(CONFIG_SETTINGS)) {
settings_load();
}
// Start advertising
err = start_bluetooth_advertise();
if (err) {
printk("Advertising failed to start (err %d)\n", err);
return 0;
}
printk("Advertising successfully started\n");
// Check if the ICM42670P device is ready
if (!device_is_ready(icm42670p_spec)) {
printk("ICM42670P device not ready\n");
return 0;
}
// Read WHO_AM_I register
read_icm42670p_who_am_i();
return 0;
}