Hi,
Sorry to be posting a lot about my LIS2DH12 on custom hardware lately. I do believe my different inquiries are to be treated as separate.
My (modified) hardware now has these connections:
Sensor
| Sensor | Connection |
| SCL | P0.05 |
| SDA | P0.02 |
| CS | VDD (I2C mode) |
| SDO | VDD (addr LSB=1) |
| INT1 | P0.06 |
| INT2 | P0.07 |
I'm trying the LIS2DH sample, only modified it to give terminal output on RTT for debugging. The output I'm seeing is:
SEGGER J-Link V7.96l - Real time terminal output
SEGGER J-Link (unknown) V1.0, SN=682410030
Process: JLink.exe
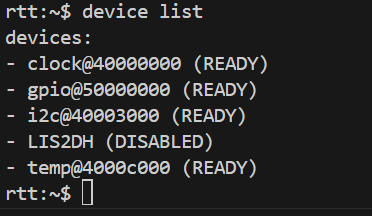
Device LIS2DH is not ready
[00:00:00.947,387] <err> lis2dh: Failed to read chip id.
*** Booting nRF Connect SDK 3758bcbfa5cd ***
Here is my code:
main.c
/*
* Copyright (c) 2019 Nordic Semiconductor ASA
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <stdio.h>
#include <zephyr/kernel.h>
#include <zephyr/device.h>
#include <zephyr/drivers/sensor.h>
#include <inttypes.h>
#include <zephyr/logging/log.h>
LOG_MODULE_REGISTER(generallogs,LOG_LEVEL_DBG);
static void fetch_and_display(const struct device *sensor)
{
static unsigned int count;
struct sensor_value accel[3];
struct sensor_value temperature;
const char *overrun = "";
int rc = sensor_sample_fetch(sensor);
++count;
if (rc == -EBADMSG) {
/* Sample overrun. Ignore in polled mode. */
if (IS_ENABLED(CONFIG_LIS2DH_TRIGGER)) {
overrun = "[OVERRUN] ";
}
rc = 0;
}
if (rc == 0) {
rc = sensor_channel_get(sensor,
SENSOR_CHAN_ACCEL_XYZ,
accel);
}
if (rc < 0) {
printf("ERROR: Update failed: %d\n", rc);
} else {
printf("#%u @ %u ms: %sx %f , y %f , z %f",
count, k_uptime_get_32(), overrun,
sensor_value_to_double(&accel[0]),
sensor_value_to_double(&accel[1]),
sensor_value_to_double(&accel[2]));
}
if (IS_ENABLED(CONFIG_LIS2DH_MEASURE_TEMPERATURE)) {
if (rc == 0) {
rc = sensor_channel_get(sensor, SENSOR_CHAN_DIE_TEMP, &temperature);
if (rc < 0) {
printf("\nERROR: Unable to read temperature:%d\n", rc);
} else {
printf(", t %f\n", sensor_value_to_double(&temperature));
}
}
} else {
printf("\n");
}
}
#ifdef CONFIG_LIS2DH_TRIGGER
static void trigger_handler(const struct device *dev,
const struct sensor_trigger *trig)
{
fetch_and_display(dev);
}
#endif
int main(void)
{
const struct device *const sensor = DEVICE_DT_GET_ANY(st_lis2dh);
if (sensor == NULL) {
printf("No device found\n");
return 0;
}
if (!device_is_ready(sensor)) {
printf("Device %s is not ready\n", sensor->name);
return 0;
}
#if CONFIG_LIS2DH_TRIGGER
{
struct sensor_trigger trig;
int rc;
trig.type = SENSOR_TRIG_DATA_READY;
trig.chan = SENSOR_CHAN_ACCEL_XYZ;
if (IS_ENABLED(CONFIG_LIS2DH_ODR_RUNTIME)) {
struct sensor_value odr = {
.val1 = 1,
};
rc = sensor_attr_set(sensor, trig.chan,
SENSOR_ATTR_SAMPLING_FREQUENCY,
&odr);
if (rc != 0) {
printf("Failed to set odr: %d\n", rc);
return 0;
}
printf("Sampling at %u Hz\n", odr.val1);
}
rc = sensor_trigger_set(sensor, &trig, trigger_handler);
if (rc != 0) {
printf("Failed to set trigger: %d\n", rc);
return 0;
}
printf("Waiting for triggers\n");
while (true) {
k_sleep(K_MSEC(2000));
}
}
#else /* CONFIG_LIS2DH_TRIGGER */
printf("Polling at 0.5 Hz\n");
while (true) {
fetch_and_display(sensor);
k_sleep(K_MSEC(2000));
}
#endif /* CONFIG_LIS2DH_TRIGGER */
}
prj.conf
CONFIG_STDOUT_CONSOLE=y CONFIG_I2C=y CONFIG_SENSOR=y CONFIG_CBPRINTF_FP_SUPPORT=y CONFIG_LOG=y CONFIG_LOG_PRINTK=y CONFIG_USE_SEGGER_RTT=y CONFIG_RTT_CONSOLE=y
.dts
// Copyright (c) 2024 Nordic Semiconductor ASA
// SPDX-License-Identifier: Apache-2.0
/dts-v1/;
#include <nordic/nrf52810_qfaa.dtsi>
#include "myboard-pinctrl.dtsi"
/ {
model = "my board";
compatible = "manuf,myboard";
chosen {
zephyr,sram = &sram0;
zephyr,flash = &flash0;
zephyr,code-partition = &slot0_partition;
};
buttons {
compatible = "gpio-keys";
sw0: button_0 {
label = "button_0";
gpios = <&gpio0 31 (GPIO_ACTIVE_LOW | GPIO_PULL_UP)>;
};
};
leds {
compatible = "gpio-leds";
led_r: led_r {
label = "Red LED";
gpios = <&gpio0 29 (GPIO_ACTIVE_LOW | (1 << 8))>;
};
led_g: led_g {
label = "Green LED";
gpios = <&gpio0 30 (GPIO_ACTIVE_LOW | (1 << 8))>;
};
led_b: led_b {
label = "Blue LED";
gpios = <&gpio0 28 (GPIO_ACTIVE_LOW | (1 << 8))>;
};
};
};
&flash0 {
partitions {
compatible = "fixed-partitions";
#address-cells = <1>;
#size-cells = <1>;
boot_partition: partition@0 {
label = "mcuboot";
reg = <0x0 0xc000>;
};
slot0_partition: partition@c000 {
label = "image-0";
reg = <0xc000 0xa000>;
};
slot1_partition: partition@16000 {
label = "image-1";
reg = <0x16000 0xa000>;
};
scratch_partition: partition@20000 {
label = "image-scratch";
reg = <0x20000 0xa000>;
};
storage_partition: partition@2a000 {
label = "storage";
reg = <0x2a000 0x6000>;
};
};
};
&gpio0 {
status = "okay";
};
&gpiote {
status = "okay";
};
&i2c0 {
status = "okay";
pinctrl-0 = <&i2c0_default>;
pinctrl-1 = <&i2c0_sleep>;
pinctrl-names = "default", "sleep";
lis2dh@19 {
compatible = "st,lis2dh";
reg = <0x19>;
label = "LIS2DH";
irq-gpios = <&gpio0 6 GPIO_ACTIVE_LOW>, <&gpio0 7 GPIO_ACTIVE_LOW>;
};
};
/*&spi0 {
cs-gpios = <&gpio0 4 GPIO_ACTIVE_LOW>;
status = "okay";
max-frequency = <DT_FREQ_M(8)>;
pinctrl-0 = <&spi0_default>;
pinctrl-names = "default";
lis2dh_spi@0 {
compatible = "st,lis2dh";
reg = <0>;
supply-gpios = <&gpio0 8 0>;
spi-max-frequency = <DT_FREQ_M(8)>;
irq-gpios = <&gpio0 6 GPIO_ACTIVE_LOW>, <&gpio0 7 GPIO_ACTIVE_LOW>;
};
};*/
&adc {
status = "okay";
};
&pinctrl {
i2c0_default {
group1 {
psels = <NRF_PSEL(TWIM_SDA, 0, 2)>,
<NRF_PSEL(TWIM_SCL, 0, 5)>;
};
};
i2c0_sleep {
group1 {
psels = <NRF_PSEL(TWIM_SDA, 0, 2)>,
<NRF_PSEL(TWIM_SCL, 0, 5)>;
};
};
};
pinctrl.dtsi
&pinctrl {
i2c0_default: i2c0_default {
group1 {
psels = <NRF_PSEL(TWIM_SDA, 0, 2)>,
<NRF_PSEL(TWIM_SCL, 0, 5)>;
};
};
i2c0_sleep: i2c0_sleep {
group1 {
psels = <NRF_PSEL(TWIM_SDA, 0, 2)>,
<NRF_PSEL(TWIM_SCL, 0, 5)>;
low-power-enable;
};
};
pwm0_default: pwm0_default {
group1 {
psels = <NRF_PSEL(PWM_OUT0, 0, 29)>;
nordic,invert;
};
};
pwm0_sleep: pwm0_sleep {
group1 {
psels = <NRF_PSEL(PWM_OUT0, 0, 29)>;
low-power-enable;
};
};
};