Hi, I'm trying to read data from an LIS2DH accelerometer using the nRF5340 DK board. I have been able to build and flash my code to the board, but the terminal outputs, "Device not ready", indicating that the sensor was not initialized properly. The code I am using (shown below) should work as it is based off the sample LIS2DH application. I was wondering if someone could help explain why the sensor is not initializing properly. Thank you!
main:
#include <stdio.h>
#include <zephyr/kernel.h>
#include <zephyr/device.h>
#include <zephyr/drivers/sensor.h>
static void fetch_and_display(const struct device *sensor)
{
static unsigned int count;
struct sensor_value accel[3];
const char *overrun = "";
int rc = sensor_sample_fetch(sensor);
++count;
if (rc == -EBADMSG) {
/* Sample overrun. Ignore in polled mode. */
if (IS_ENABLED(CONFIG_LIS2DH_TRIGGER)) {
overrun = "[OVERRUN] ";
}
rc = 0;
}
if (rc == 0) {
rc = sensor_channel_get(sensor,
SENSOR_CHAN_ACCEL_XYZ,
accel);
}
if (rc < 0) {
printf("ERROR: Update failed: %d\n", rc);
} else {
printf("#%u @ %u ms: %sx %f , y %f , z %f",
count, k_uptime_get_32(), overrun,
sensor_value_to_double(&accel[0]),
sensor_value_to_double(&accel[1]),
sensor_value_to_double(&accel[2]));
}
}
int main(void)
{
const struct device *const sensor = DEVICE_DT_GET_ANY(st_lis2dh);
if (sensor == NULL) {
printf("No device found\n");
return 0;
}
if (!device_is_ready(sensor)) {
printf("Device %s is not ready\n", sensor->name);
return 0;
}
printf("Polling at 0.5 Hz\n");
while (true) {
fetch_and_display(sensor);
k_sleep(K_MSEC(2000));
}
}
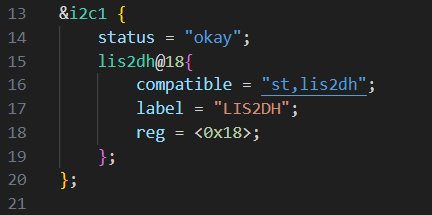
Overlay file:
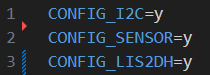
prj.conf: