
Board : Nrf52480 custom board
IDE: VSCODE
NRF version : 2.6.99
Zephyr Version : 1.6.0
Segger systemview: 3.54
I followed the instruction from Zephyr RTOS, for using the SystemView on the custom made NRF52480 board.
CONFIG_STDOUT_CONSOLE=y # enable to use thread names CONFIG_THREAD_NAME=y CONFIG_SEGGER_SYSTEMVIEW=y CONFIG_USE_SEGGER_RTT=y CONFIG_TRACING=y # enable for post-mortem tracing CONFIG_SEGGER_SYSVIEW_POST_MORTEM_MODE=n
I have enabled all the configuration as given in the zephyr RTOS. It compiled without any error
But the jlink is not detected by the segger systemview.
Given below one of the configuration i tried with the segger SystemView
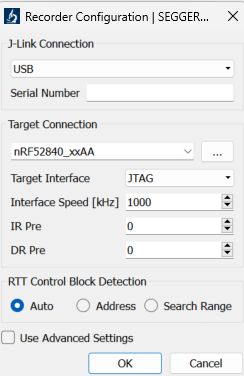
I have also tried different configuration such as changing it to SWD, and changing the interface speed.
But the segger Systemview does not detect the jlink.
Do i have to do anything in addition to the the Zephyr Tracing doc to make it work with the NRF52480
What additional thing i should do in order for it work in my system, Any help is kindly appreciated.
FYI: the jlink is connected and board is switched on, and the VScode, wsl USB detects the device.

