Hi everyone
We have had the experience on two different LwM2M servers that the Observer attributes are not being respected by the LwM2M client. Reading the Observer attributes we can also see that they are set, but just not respected
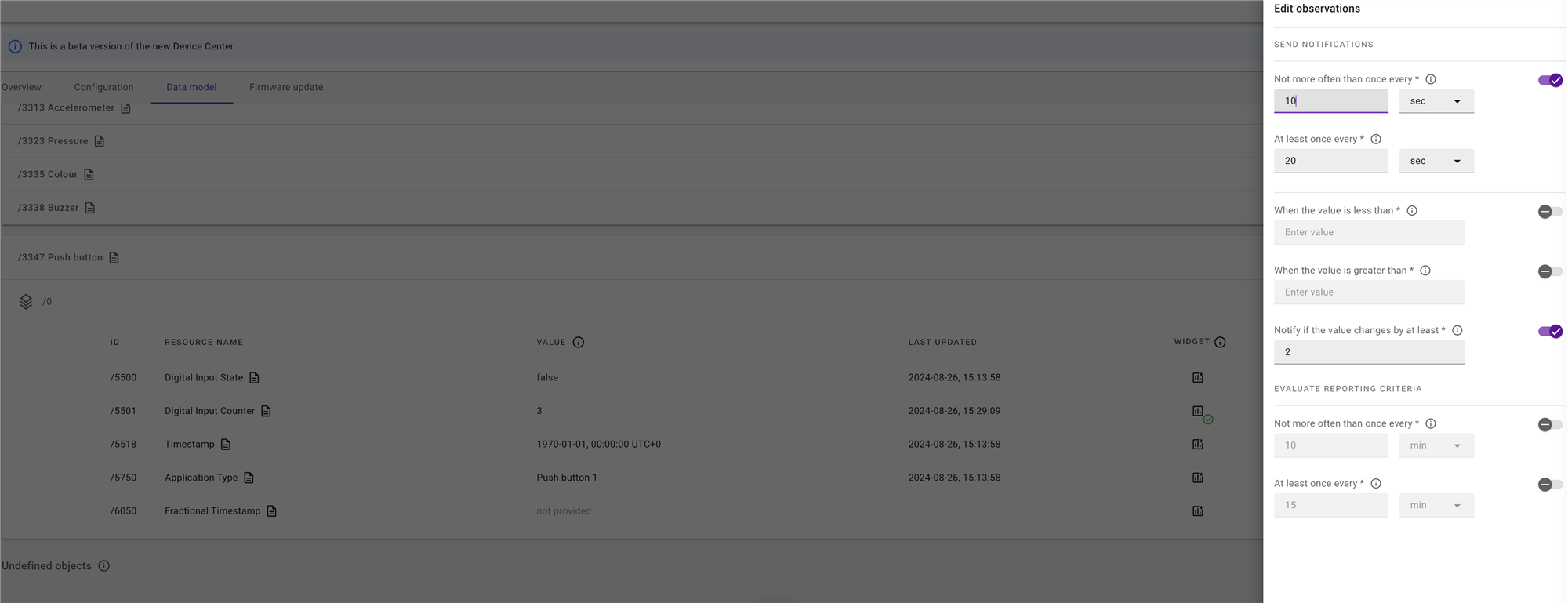
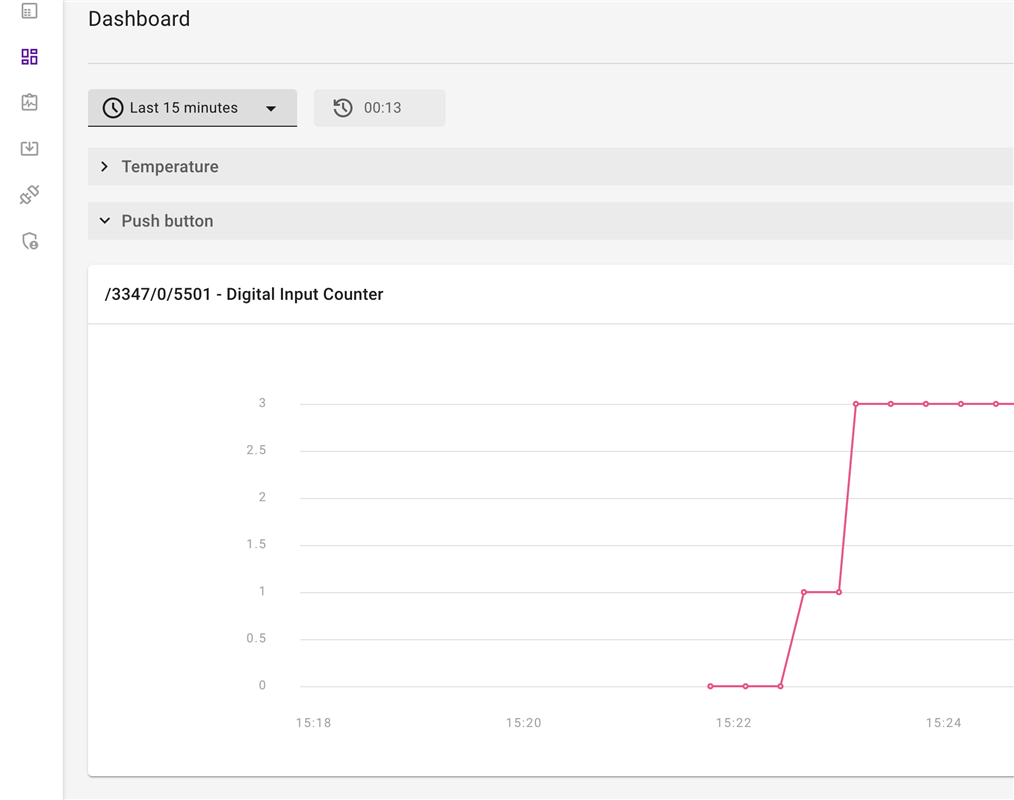
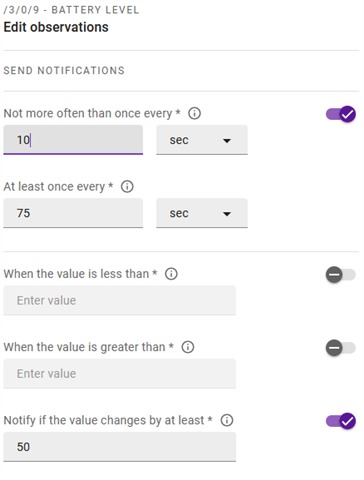
pmin:
- Minimum time between updates
- even if the observed value changes, the Observer will not send an update before pmin seconds --> e.g. A changing value will only be updated every 10 minutes, even if it changes every 30 seconds
- Works as intended
pmax:
- Maximum time between updates
- even if the observed value doesn't change, the Observer will send an update after pmax seconds --> e.g. At least one value every 6h, even if it does not change
- works as intended
gt:
- Threshold value
- Observer only sends an update if the observed value EXCEEDS a certain threshold --> e.g. Temperatures under 25°C are ignored. An update is only sent when Value crosses Threshold or after pmax has expired
- does not work as expected
lt:
- Threshold value
- Same as above, but reversed. Only reports values BELOW the threshold --> e.g. Temperatures above 36°C are ignored
- does not work as expected
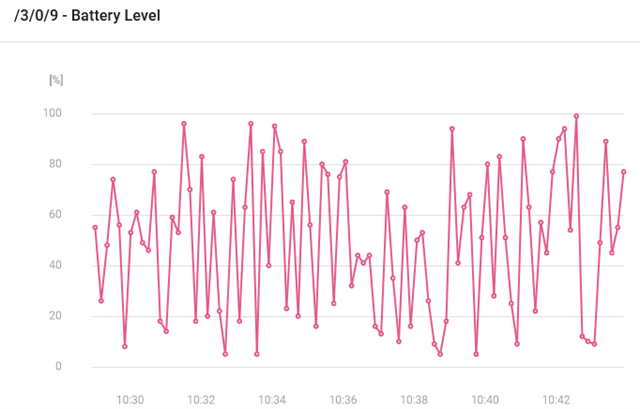
st:
- Step value
- Observer reports the value if it changes by X from one measurement to the other --> e.g. Change from 36.2°C to 36.4°C is ignored, but a change from 36.2°C to 22.3°C is reported
- does not work as expected
Does anyone have any experience with this issue?
We are working on a custom Board based on the Thingy:91; running Toolchain v2.6.2, modem Firmware v1.3.6, Application based on the LwM2M Client Sample.
This Issue should be reproducible on a Thingy:91 running the LwM2M Client sample though.
I will update this post with more information tomorrow