
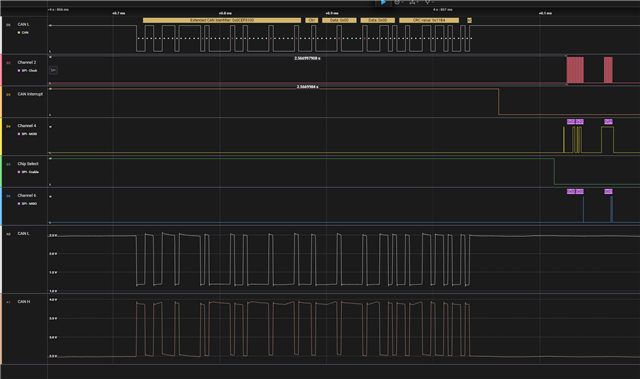
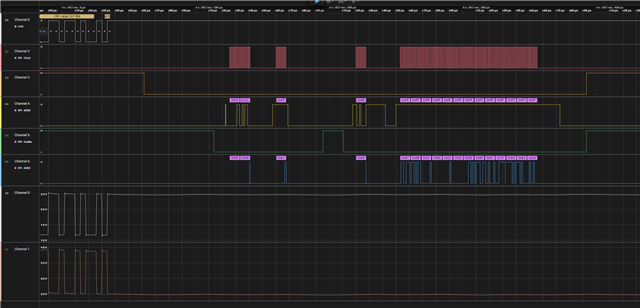
I'm developing a custom board with a uBlox NORA-B121 module, which contains an nRF5340. The board has a Microchip MCP2515 CAN controller, and for some reason, I can't receive CAN data. I can send it, the controller appears to receive correctly, and the result is transmitted on the SPI bus, but software never seems to recognize that something has been received. I've been using the Zephyr CAN counter sample, slightly modified with hardware setup code and config to enable RTT and disable CAN loopback. I have 2 of these units with CANH/CANL connected together, and termination enabled on one of the boards (my logic analyzer doesn't pick the data with termination on both ends, but CAN works well enough like this with a short bus at low speed.) The screenshots show transmit and receive sequences: the Tx command is sent on SPI, the frame is transmitted, the controller asserts its interrupt# line on completion, the 5340 reads and resets the interrupt flag, and the CAN controller deasserts interrupt#. On receive (of a frame send from the other unit,) the CAN controller interrupts, the 5340 reads the interrupt flags, and receives the frame contents. The CAN controller deasserts interrupt#, as the receive flag is automatically cleared by reading out the buffer contents. I don't have an example of SPI traffic for this when it's working, but from reading the datasheet, this all looks right. However, whether I use message queqes with can_add_rx_filter_msgq() or a callback with can_add_rx_filter(), the relevant callback or message queue monitor never triggers, and I can't get CAN traffic in Zephyr.
Transmit command and CAN transmission
![]()
Transmission complete interrupt and flag clear
![]()
CAN frame reception
Receive Interrupt and reading CAN data into nRF5340 via SPI
Relevant sections of the cpuapp_common.dtsi file from my BSP
chosen {
zephyr,console = &uart0;
zephyr,shell-uart = &uart0;
zephyr,uart-mcumgr = &uart0;
zephyr,bt-mon-uart = &uart0;
zephyr,bt-uart = &uart0;
zephyr,bt-c2h-uart = &uart0;
zephyr,bt-hci-ipc = &ipc0;
nordic,802154-spinel-ipc = &ipc0;
zephyr,ieee802154 = &ieee802154;
zephyr,canbus = &can0;
....
arduino_spi: &spi3 {
compatible = "nordic,nrf-spim";
status = "okay";
cs-gpios = <&gpio0 27 GPIO_ACTIVE_LOW>; //CAN CS
pinctrl-0 = <&spi3_default>;
pinctrl-1 = <&spi3_sleep>;
pinctrl-names = "default", "sleep";
can0: can@0 {
compatible = "microchip,mcp2515";
spi-max-frequency = <1000000>;
int-gpios = <&gpio1 14 GPIO_ACTIVE_LOW>; //CAN Interrupt
status = "okay";
reg = <0x0>;
osc-freq = <20000000>;
bus-speed = <250000>;
sample-point = <875>;
can-transceiver {
max-bitrate = <1000000>;
};
};
};
main.c
/*
* Copyright (c) 2018 Alexander Wachter
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <stdio.h>
#include <zephyr/kernel.h>
#include <zephyr/sys/printk.h>
#include <zephyr/device.h>
#include <zephyr/drivers/can.h>
#include <zephyr/drivers/gpio.h>
#include <zephyr/sys/byteorder.h>
#define RX_THREAD_STACK_SIZE 512
#define RX_THREAD_PRIORITY 2
#define STATE_POLL_THREAD_STACK_SIZE 512
#define STATE_POLL_THREAD_PRIORITY 2
#define LED_MSG_ID 0x10
#define COUNTER_MSG_ID 0x12345
#define SET_LED 1
#define RESET_LED 0
#define SLEEP_TIME K_MSEC(250)
K_THREAD_STACK_DEFINE(rx_thread_stack, RX_THREAD_STACK_SIZE);
K_THREAD_STACK_DEFINE(poll_state_stack, STATE_POLL_THREAD_STACK_SIZE);
const struct device *const can_dev = DEVICE_DT_GET(DT_CHOSEN(zephyr_canbus));
struct gpio_dt_spec led = GPIO_DT_SPEC_GET_OR(DT_ALIAS(led0), gpios, {0});
struct k_thread rx_thread_data;
struct k_thread poll_state_thread_data;
struct k_work_poll change_led_work;
struct k_work state_change_work;
enum can_state current_state;
struct can_bus_err_cnt current_err_cnt;
CAN_MSGQ_DEFINE(change_led_msgq, 2);
CAN_MSGQ_DEFINE(counter_msgq, 2);
static struct k_poll_event change_led_events[1] = {
K_POLL_EVENT_STATIC_INITIALIZER(K_POLL_TYPE_MSGQ_DATA_AVAILABLE,
K_POLL_MODE_NOTIFY_ONLY,
&change_led_msgq, 0)
};
void tx_irq_callback(const struct device *dev, int error, void *arg)
{
char *sender = (char *)arg;
ARG_UNUSED(dev);
if (error != 0) {
printf("Callback! error-code: %d\nSender: %s\n",
error, sender);
}
}
void rx_thread(void *arg1, void *arg2, void *arg3)
{
ARG_UNUSED(arg1);
ARG_UNUSED(arg2);
ARG_UNUSED(arg3);
const struct can_filter filter = {
.flags = CAN_FILTER_DATA | CAN_FILTER_IDE,
.id = COUNTER_MSG_ID,
.mask = CAN_EXT_ID_MASK
};
struct can_frame frame;
int filter_id;
filter_id = can_add_rx_filter_msgq(can_dev, &counter_msgq, &filter);
printf("Counter filter id: %d\n", filter_id);
while (1) {
k_msgq_get(&counter_msgq, &frame, K_FOREVER);
if (frame.dlc != 2U) {
printf("Wrong data length: %u\n", frame.dlc);
continue;
}
printf("Counter received: %u\n",
sys_be16_to_cpu(UNALIGNED_GET((uint16_t *)&frame.data)));
}
}
void change_led_work_handler(struct k_work *work)
{
struct can_frame frame;
int ret;
while (k_msgq_get(&change_led_msgq, &frame, K_NO_WAIT) == 0) {
if (led.port == NULL) {
printf("LED %s\n", frame.data[0] == SET_LED ? "ON" : "OFF");
} else {
gpio_pin_set(led.port, led.pin, frame.data[0] == SET_LED ? 1 : 0);
}
}
ret = k_work_poll_submit(&change_led_work, change_led_events,
ARRAY_SIZE(change_led_events), K_FOREVER);
if (ret != 0) {
printf("Failed to resubmit msgq polling: %d", ret);
}
}
char *state_to_str(enum can_state state)
{
switch (state) {
case CAN_STATE_ERROR_ACTIVE:
return "error-active";
case CAN_STATE_ERROR_WARNING:
return "error-warning";
case CAN_STATE_ERROR_PASSIVE:
return "error-passive";
case CAN_STATE_BUS_OFF:
return "bus-off";
case CAN_STATE_STOPPED:
return "stopped";
default:
return "unknown";
}
}
void poll_state_thread(void *unused1, void *unused2, void *unused3)
{
struct can_bus_err_cnt err_cnt = {0, 0};
struct can_bus_err_cnt err_cnt_prev = {0, 0};
enum can_state state_prev = CAN_STATE_ERROR_ACTIVE;
enum can_state state;
int err;
while (1) {
err = can_get_state(can_dev, &state, &err_cnt);
if (err != 0) {
printf("Failed to get CAN controller state: %d", err);
k_sleep(K_MSEC(100));
continue;
}
if (err_cnt.tx_err_cnt != err_cnt_prev.tx_err_cnt ||
err_cnt.rx_err_cnt != err_cnt_prev.rx_err_cnt ||
state_prev != state) {
err_cnt_prev.tx_err_cnt = err_cnt.tx_err_cnt;
err_cnt_prev.rx_err_cnt = err_cnt.rx_err_cnt;
state_prev = state;
printf("state: %s\n"
"rx error count: %d\n"
"tx error count: %d\n",
state_to_str(state),
err_cnt.rx_err_cnt, err_cnt.tx_err_cnt);
} else {
k_sleep(K_MSEC(100));
}
}
}
void state_change_work_handler(struct k_work *work)
{
printf("State Change ISR\nstate: %s\n"
"rx error count: %d\n"
"tx error count: %d\n",
state_to_str(current_state),
current_err_cnt.rx_err_cnt, current_err_cnt.tx_err_cnt);
#ifndef CONFIG_CAN_AUTO_BUS_OFF_RECOVERY
if (current_state == CAN_STATE_BUS_OFF) {
printf("Recover from bus-off\n");
if (can_recover(can_dev, K_MSEC(100)) != 0) {
printf("Recovery timed out\n");
}
}
#endif /* CONFIG_CAN_AUTO_BUS_OFF_RECOVERY */
}
void state_change_callback(const struct device *dev, enum can_state state,
struct can_bus_err_cnt err_cnt, void *user_data)
{
struct k_work *work = (struct k_work *)user_data;
ARG_UNUSED(dev);
current_state = state;
current_err_cnt = err_cnt;
k_work_submit(work);
}
int custom_hw_init(){
static const struct gpio_dt_spec can_term = GPIO_DT_SPEC_GET(DT_ALIAS(cantermpin), gpios);
static const struct gpio_dt_spec gps_mux1 = GPIO_DT_SPEC_GET(DT_ALIAS(gpsmux1pin), gpios);
static const struct gpio_dt_spec gps_mux2 = GPIO_DT_SPEC_GET(DT_ALIAS(gpsmux2pin), gpios);
static const struct gpio_dt_spec serial_en = GPIO_DT_SPEC_GET(DT_ALIAS(serialenpin), gpios);
static const struct gpio_dt_spec gps_en = GPIO_DT_SPEC_GET(DT_ALIAS(gpsenpin), gpios);
static const struct gpio_dt_spec S1_422 = GPIO_DT_SPEC_GET(DT_ALIAS(s1modepin), gpios);
static const struct gpio_dt_spec S2_422 = GPIO_DT_SPEC_GET(DT_ALIAS(s2modepin), gpios);
static const struct gpio_dt_spec S_spd = GPIO_DT_SPEC_GET(DT_ALIAS(serialspdpin), gpios);
static const struct gpio_dt_spec ledgate = GPIO_DT_SPEC_GET(DT_ALIAS(led3), gpios);
gpio_pin_configure_dt(&can_term, GPIO_OUTPUT_ACTIVE);
gpio_pin_configure_dt(&gps_mux1, GPIO_OUTPUT_INACTIVE);
gpio_pin_configure_dt(&gps_mux2, GPIO_OUTPUT_INACTIVE);
gpio_pin_configure_dt(&serial_en, GPIO_OUTPUT_INACTIVE);
gpio_pin_configure_dt(&gps_en, GPIO_OUTPUT_INACTIVE);
gpio_pin_configure_dt(&S1_422, GPIO_OUTPUT_ACTIVE);
gpio_pin_configure_dt(&S2_422, GPIO_OUTPUT_ACTIVE);
gpio_pin_configure_dt(&S_spd, GPIO_OUTPUT_ACTIVE);
gpio_pin_configure_dt(&ledgate, GPIO_OUTPUT_ACTIVE);
return 0;
}
int main(void)
{
const struct can_filter change_led_filter = {
.flags = CAN_FILTER_DATA,
.id = LED_MSG_ID,
.mask = CAN_STD_ID_MASK
};
struct can_frame change_led_frame = {
.flags = 0,
.id = LED_MSG_ID,
.dlc = 1
};
struct can_frame counter_frame = {
.flags = CAN_FRAME_IDE,
.id = COUNTER_MSG_ID,
.dlc = 2
};
uint8_t toggle = 1;
uint16_t counter = 0;
k_tid_t rx_tid, get_state_tid;
int ret;
custom_hw_init();
if (!device_is_ready(can_dev)) {
printf("CAN: Device %s not ready.\n", can_dev->name);
return 0;
}
#ifdef CONFIG_LOOPBACK_MODE
ret = can_set_mode(can_dev, CAN_MODE_LOOPBACK);
if (ret != 0) {
printf("Error setting CAN mode [%d]", ret);
return 0;
}
#endif
ret = can_start(can_dev);
if (ret != 0) {
printf("Error starting CAN controller [%d]", ret);
return 0;
}
if (led.port != NULL) {
if (!gpio_is_ready_dt(&led)) {
printf("LED: Device %s not ready.\n",
led.port->name);
return 0;
}
ret = gpio_pin_configure_dt(&led, GPIO_OUTPUT_HIGH);
if (ret < 0) {
printf("Error setting LED pin to output mode [%d]",
ret);
led.port = NULL;
}
}
k_work_init(&state_change_work, state_change_work_handler);
k_work_poll_init(&change_led_work, change_led_work_handler);
ret = can_add_rx_filter_msgq(can_dev, &change_led_msgq, &change_led_filter);
if (ret == -ENOSPC) {
printf("Error, no filter available!\n");
return 0;
}
printf("Change LED filter ID: %d\n", ret);
ret = k_work_poll_submit(&change_led_work, change_led_events,
ARRAY_SIZE(change_led_events), K_FOREVER);
if (ret != 0) {
printf("Failed to submit msgq polling: %d", ret);
return 0;
}
rx_tid = k_thread_create(&rx_thread_data, rx_thread_stack,
K_THREAD_STACK_SIZEOF(rx_thread_stack),
rx_thread, NULL, NULL, NULL,
RX_THREAD_PRIORITY, 0, K_NO_WAIT);
if (!rx_tid) {
printf("ERROR spawning rx thread\n");
}
get_state_tid = k_thread_create(&poll_state_thread_data,
poll_state_stack,
K_THREAD_STACK_SIZEOF(poll_state_stack),
poll_state_thread, NULL, NULL, NULL,
STATE_POLL_THREAD_PRIORITY, 0,
K_NO_WAIT);
if (!get_state_tid) {
printf("ERROR spawning poll_state_thread\n");
}
can_set_state_change_callback(can_dev, state_change_callback, &state_change_work);
printf("Finished init.\n");
while (1) {
//change_led_frame.data[0] = toggle++ & 0x01 ? SET_LED : RESET_LED;
change_led_frame.data[0] = 0x02; //debug
/* This sending call is none blocking. */
can_send(can_dev, &change_led_frame, K_FOREVER,
tx_irq_callback,
"LED change");
k_sleep(SLEEP_TIME);
UNALIGNED_PUT(sys_cpu_to_be16(counter),
(uint16_t *)&counter_frame.data[0]);
counter++;
/* This sending call is blocking until the message is sent. */
can_send(can_dev, &counter_frame, K_MSEC(100), NULL, NULL);
k_sleep(SLEEP_TIME);
}
}

