
I am programming with the nRF52840DKs. [Toolchain Manager: v1.3.0, IDE: Visual Studio Code (VSCode), SDK: ncs v2.6.0, window11 pro]
I am currently working on integrating 'NUS_peripheral' and 'SPIM'.
My goal: communicate with the ADC via SPIM and transmit the collected data via Bluetooth.
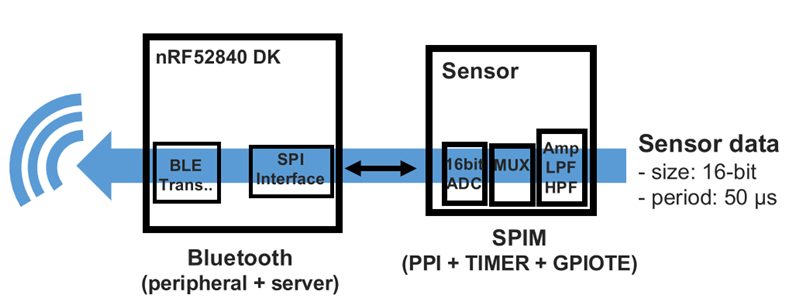
To briefly explain my code, the SPIM turns on and off at regular intervals using a timer. The NUS (peripheral) sends data through a while loop.
However, it seems that there's a conflict between the SPIM and the while loop in the BLE thread.
Below are the main code:
#define MTU_SIZE 244
#define PRIORITY 7
nrfx_spim_t spim1_inst = NRFX_SPIM_INSTANCE(SPIM_INST_IDX);
nrfx_timer_t timer1_inst = NRFX_TIMER_INSTANCE(TIMER_INST_IDX);
nrfx_gpiote_t gpiote_inst = NRFX_GPIOTE_INSTANCE(GPIOTE_INST_IDX);
nrf_ppi_channel_t ppi_channel_spi_start;
nrf_ppi_channel_t ppi_channel_spi_end;
volatile uint16_t initialization_counter = 0;
volatile uint16_t repeat_counter = 0;
volatile uint16_t NUS_send_counter = 0;
volatile bool initialization_stop = false;
#define TIME_TO_WAIT_US 50
uint8_t spim_tx_buf_initial[30][2];
uint8_t spim_tx_buf_repeat[18][2];
#define rx_data_size 4096
uint8_t spim_rx_buf_A[rx_data_size][2];
uint8_t spim_rx_buf_B[rx_data_size][2];
uint8_t (*spim_buffer)[2];
uint8_t (*nus_buffer)[2];
uint8_t out_channel;
void spim1_handler(nrfx_spim_evt_t const * p_event, void * p_context) {
NUS_send_counter++;
if(!initialization_stop){
initialization_counter++;
if(initialization_counter == 30){
initialization_stop = true;
spim1_inst.p_reg->TXD.PTR = (uint32_t)spim_tx_buf_repeat[0];
}
return ;
}
repeat_counter++;
if ( repeat_counter % 18 == 0 ) {
spim1_inst.p_reg->TXD.PTR = (uint32_t)spim_tx_buf_repeat[0];
}
}
void timer0_handler(nrf_timer_event_t event_type, void * p_context){
}
void peripheral_setup(void){
nrfx_err_t error;
(void)error;
/* GPIOTE Setting */
static const nrfx_gpiote_output_config_t output_config = {
.drive = NRF_GPIO_PIN_S0S1,
.input_connect = NRF_GPIO_PIN_INPUT_DISCONNECT,
.pull = NRF_GPIO_PIN_NOPULL,
};
const nrfx_gpiote_task_config_t task_config = {
.task_ch = out_channel,
.polarity = NRF_GPIOTE_POLARITY_TOGGLE,
.init_val = NRF_GPIOTE_INITIAL_VALUE_HIGH,
};
error = nrfx_gpiote_output_configure(&gpiote_inst, SS_PIN_MASTER, &output_config, &task_config);
nrfx_gpiote_out_task_enable(&gpiote_inst, SS_PIN_MASTER);
/* SPIM 1 Setting */
nrfx_spim_config_t spim1_config = NRFX_SPIM_DEFAULT_CONFIG(SCK_PIN_MASTER,
MOSI_PIN_MASTER,
MISO_PIN_MASTER,
NRF_SPIM_PIN_NOT_CONNECTED);
spim1_config.frequency = NRFX_MHZ_TO_HZ(8);
error = nrfx_spim_init(&spim1_inst, &spim1_config, spim1_handler,0);
nrfx_spim_xfer_desc_t spim1_xfer_desc = NRFX_SPIM_XFER_TRX((uint8_t*)spim_tx_buf_initial, 2, (uint8_t*)spim_rx_buf_A, 2);
uint32_t spim1_flags = NRFX_SPIM_FLAG_HOLD_XFER | NRFX_SPIM_FLAG_REPEATED_XFER;
error = nrfx_spim_xfer(&spim1_inst, &spim1_xfer_desc, spim1_flags);
spim1_inst.p_reg->TXD.PTR = (uint32_t)spim_tx_buf_initial[0];
spim1_inst.p_reg->TXD.MAXCNT = 2;
spim1_inst.p_reg->TXD.LIST =SPIM_TXD_LIST_LIST_ArrayList << SPIM_TXD_LIST_LIST_Pos;
spim1_inst.p_reg->RXD.PTR = (uint32_t)spim_rx_buf_A[0];
spim1_inst.p_reg->RXD.MAXCNT = 2;
spim1_inst.p_reg->RXD.LIST = SPIM_RXD_LIST_LIST_ArrayList << SPIM_RXD_LIST_LIST_Pos;
/* TIMER 0 Setting */
nrfx_timer_config_t timer0_config = NRFX_TIMER_DEFAULT_CONFIG(16000000);
timer0_config.bit_width = NRF_TIMER_BIT_WIDTH_32,
error = nrfx_timer_init(&timer1_inst, &timer0_config, timer0_handler);
//error = nrfx_timer_init(&timer1_inst, &timer0_config, NULL);
nrfx_timer_clear(&timer1_inst);
k_sleep(K_MSEC(2000));
uint32_t desired_ticks = nrfx_timer_us_to_ticks(&timer1_inst, TIME_TO_WAIT_US);
nrfx_timer_extended_compare(&timer1_inst, NRF_TIMER_CC_CHANNEL0, desired_ticks, NRF_TIMER_SHORT_COMPARE0_CLEAR_MASK, true);
/* PPI Setting */
uint32_t gpiote_task_addr = nrfx_gpiote_out_task_address_get(&gpiote_inst ,SS_PIN_MASTER);
uint32_t timer_start_compare_event_addr = nrfx_timer_compare_event_address_get(&timer1_inst, NRF_TIMER_CC_CHANNEL0);
uint32_t spi_start_task_addr = nrfx_spim_start_task_address_get(&spim1_inst);
uint32_t spi_end_evt_addr = nrfx_spim_end_event_address_get(&spim1_inst);
// Timer reaches the desired tick -> GPIOTE toggle(off), SPI start
error = nrfx_gppi_channel_alloc(&ppi_channel_spi_start);
nrfx_gppi_channel_endpoints_setup(ppi_channel_spi_start, timer_start_compare_event_addr, gpiote_task_addr);
nrfx_gppi_fork_endpoint_setup(ppi_channel_spi_start, spi_start_task_addr);
// SPI tx-rx transmission ends -> GPIOTE toggle(on)
error = nrfx_gppi_channel_alloc(&ppi_channel_spi_end);
nrfx_gppi_channel_endpoints_setup(ppi_channel_spi_end, spi_end_evt_addr, gpiote_task_addr);
}
void ble_write_thread(void){
int ret;
uint16_t temp;
uint8_t (*temp_buffer)[2];
k_sem_take(&nus_start, K_FOREVER);
LOG_INF("Starting BLE Write Thread");
while (1) {
temp = NUS_send_counter;
NUS_send_counter = 0;
temp_buffer = spim_buffer;
spim_buffer = nus_buffer;
nus_buffer = temp_buffer;
spim1_inst.p_reg->RXD.PTR = (uint32_t)spim_buffer;
while(temp > 0){
if(temp < MTU_SIZE){
ret = bt_nus_send(current_conn, (uint8_t *)nus_buffer, temp);
temp = 0;
break;
}else{
ret = bt_nus_send(current_conn, (uint8_t *)nus_buffer, MTU_SIZE);
temp -= MTU_SIZE;
}
}
if (k_sem_take(&disconnect_sem, K_NO_WAIT) == 0){
LOG_INF("Disconnected, exiting BLE Write Thread");
return;
}
}
}
K_THREAD_DEFINE(ble_write_thread_id, 8192, ble_write_thread, NULL, NULL, NULL, PRIORITY, 0, 0);
