Hi, I am trying to run DHCP Client example using ethernet w5500 and my nrf is continously going into fault. sometimes it gets the ip correctly and goes into fault and other times when it starts immediately goes into fault.
I have ran same code on nrf52832 and it works fine, even tries it on nrf9160 and works fine, the issue occur on this one
any insights on this ?
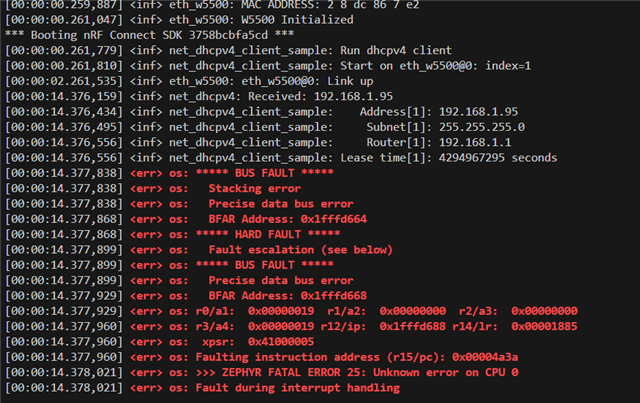
This pictures shows it got the IP from router and went into fault
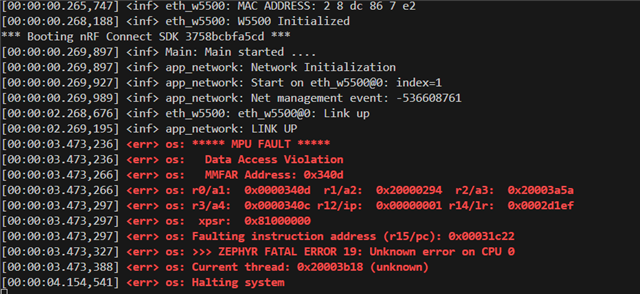
This picture shows it went into fault in the start
I tried running mqtt with ethernet and was going into fault as well and mqtt with ethernet works fine on nrf52832
Also I tried increasing stack size and also given alot of heap but same issue, so it is definitly not related to that.