Hello,
We are trying to use nrf5340 and W25Q128JV (https://www.winbond.com/resource-files/W25Q128JV%20RevI%2008232021%20Plus.pdf) nor flash on our own designed card. I am checking the flash operation via spi_flash example.

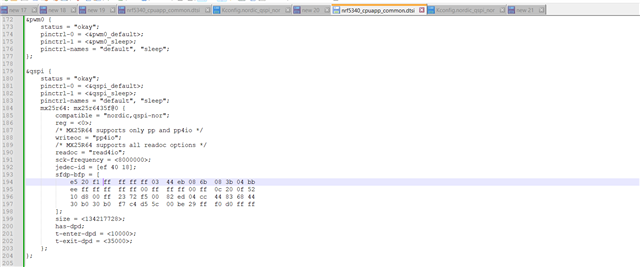
I made changes to the DTS file. (jedec-id = [ef 40 18]; size = <134217728>;)
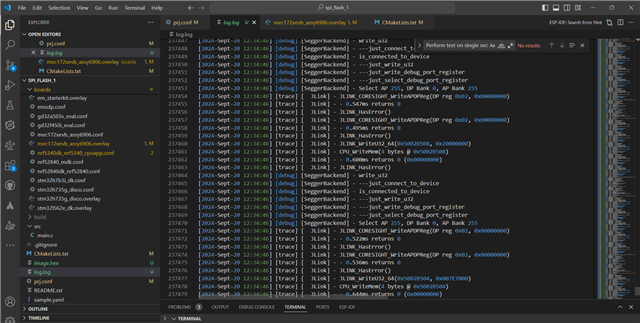
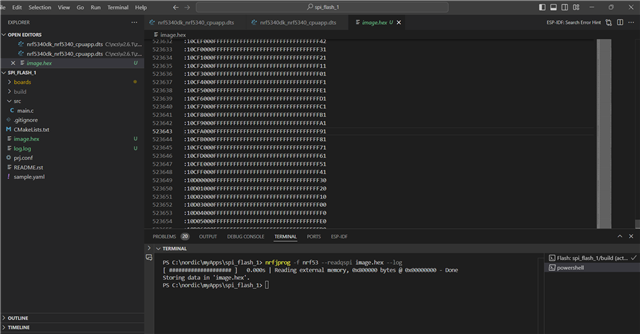
When reading flash, FF is displayed and I can't write data to flash. Can you support me?
Thanks