I am using the cdc_acm example and have added a command to set and read tx power. I am trying to use the following commands for this.
BT_HCI_OP_VS_WRITE_TX_POWER_LEVEL
BT_HCI_OP_VS_READ_TX_POWER_LEVEL
When I try to read or set tx power the following error is seen.
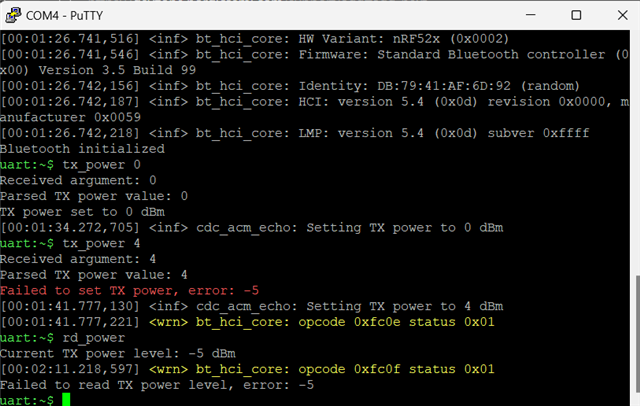
As I understand this is due to a wrong implementation of the vendor specific HCI command but I am unsure how to resolve this issue, also in the above screenshot the error is not seen if the power is set to 0dBm which should be the default.
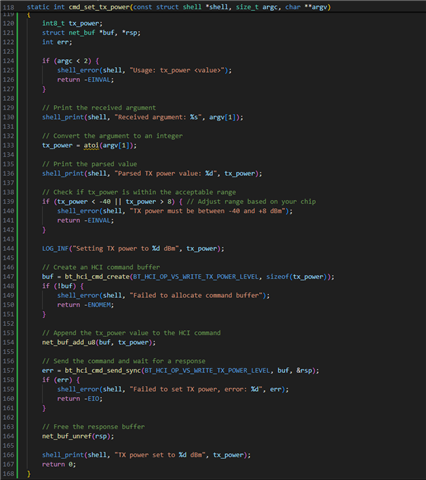
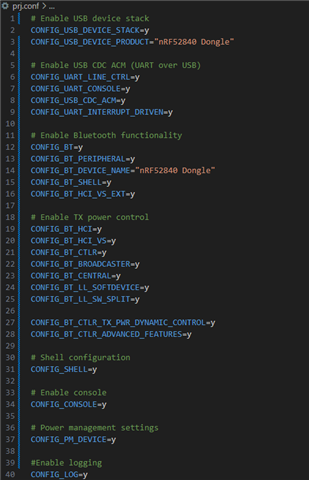
The implementation for this can be seen below as well as the project config file.